Web 概要集 IS1
タイムテーブル
第1日目:12月6日(木)
| 時刻 | F205・F206 | ホワイエ |
| 9:10 | 開会 | |
| 9:15 | OS1 認識・基礎 | |
| 10:50 | 休 憩 | |
| 11:00 | OS2 メディア・映像 | |
| 12:35 | 昼 食 休 憩 | |
| 13:30 | IS1 インタラクティブセッション IS1-A 認識・基礎(1) IS1-B メディア・映像(1) IS1-C 産業応用(1) IS1-D ロボット・3次元・計測(1) |
|
| 15:00 | 外観検査アルゴリズムコンテスト2018 | |
| 15:20 | SS1:特別企画セッション1 | |
| 16:50 | 休 憩 | |
| 17:00 |
ST1:特別講演1 | |
| 18:30 | 懇親会(ベイブリッジカフェテリア(パシフィコ横浜 会議センター6F)) | |
第2日目:12月7日(金)
| 時刻 | F205・F206 | ホワイエ |
| 9:15 | OS3 産業応用 | |
| 10:50 | 休 憩 | |
| 11:00 | OS4 ロボット・3次元・計測 | |
| 12:35 | 昼 食 休 憩 | |
| 13:30 | IS2 インタラクティブセッション IS2-A 認識・基礎(2) IS2-B メディア・映像(2) IS2-C 産業応用(2) IS2-D ロボット・3次元・計測(2) IS2-E 外観検査アルゴリズムコン テスト2018 |
|
| 15:00 | SS2:特別企画セッション2 | |
| 16:30 | 休 憩 | |
| 16:40 | 小田原賞表彰式 | |
| 16:50 | ST2:特別講演2 | |
| 17:50 | 閉会 | |
- 時間は,変更になる場合があります
- OS□-K:基調講演(30分,質疑応答を含む)
- OS□-O△,SS-O△:オーラル講演(20分,質疑応答を含む)
- OS□-H△:ハイブリットオーラル講演(5分,質疑応答なし)
IS1 : インタラクティブセッション
| 12月6日(木) 13:30~15:00 |
| IS1-A 認識・基礎(1) | |
| IS1-A1 | Pair-wise AttentionNetによる歩行者候補領域の高精度化 |
| (OS1-H1) | 小芝 駿王, 福井 宏, 山下 隆義, 藤吉 弘亘(中部大), 村瀬 洋(名古屋大) |
| 概要:Faster R-CNNベースの歩行者検出は,Region Proposal Network(RPN)て゛候補領域を検出し,候補領域に対して歩行者と背景の識別を行う.RPNで検出した領域はオクルージョンが発生した矩形に位置ずれが生じやすいため,AttentionNetを用いて矩形の補正を行う.しかし,従来のAttentionNetは矩形の左上と右下の座標の移動方向を独立して推定するため,オクルーシ゛ョンか゛発生した矩形に対して正しい推定ができない.そのため,本研究て゛は,左上と右下の座標の移動方向を連動させたPair-wise AttentionNetを提案する. | |
| キーワード:歩行者検出、AttentionNet、Faster R-CNN | |
| |
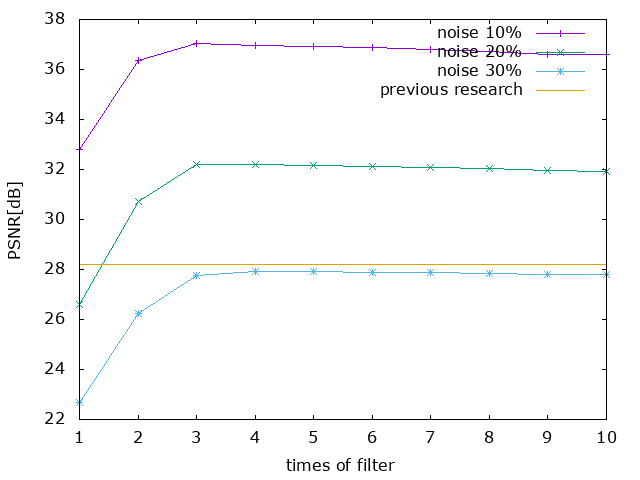
| IS1-A2 | 医用画像におけるバイラテラルフィルタのパラメータ決定の高速化 |
| 与座 章宙, 山田 親稔, 宮城 桂(沖縄高専), 市川 周一(豊橋技科大) | |
| 概要:画像処理技術では暗い空間でも明るい写真を撮影するため信号を増幅するが,ノイズも増幅される.ノイズを除去するため,バイラテラルフィルタが用いられる.性能を最大限発揮するため,パラメータの探索を必要とするが,探索には長時間の処理を要する.バイラテラルフィルタは繰り返して処理を施すことでより強力にノイズを除去する特徴がある.本研究はこの特徴を活かし,効率的な探索手法を提案し,実行時間を大幅に短縮した. | |
| キーワード:医用画像、バイラテラルフィルタ、PSNR、SSIM | |
| |
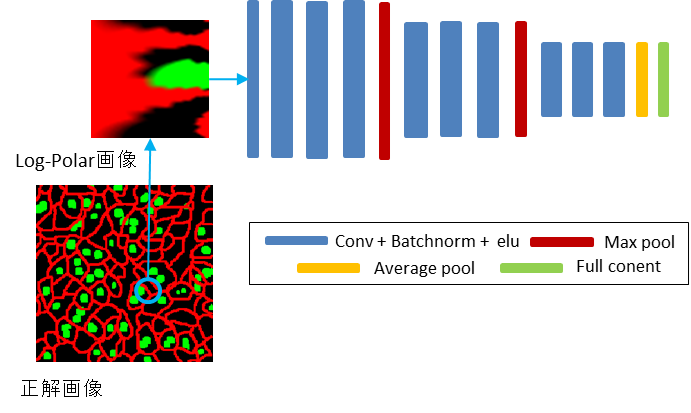
| IS1-A3 | Log-Polar変換とCNNを用いた少ない学習画像から細胞画像のセグメンテーション |
| (OS1-H2) | 本多 慶伍(名城大), 今西 彩子, 寺井 健太, 松田 道行(京都大), 堀田 一弘(名城大) |
| 概要:一般に,CNNの学習には大量の学習画像とそれに対応する正解画像が必要となる.細胞画像のセグメンテーションを行う場合,正解画像は熟練した観測者により作成されるため,負担が大きい.そのため,少ない学習画像から如何に学習するかが課題である.本研究では,入力画像をLog-Polar変換してCNNに学習させることにより,少ない学習画像からでも従来法と同等かそれ以上の精度を出すことを確認した. | |
| キーワード:セマンティックセグメンテーション,少ない学習画像,Log-Polar変換 | |
| |
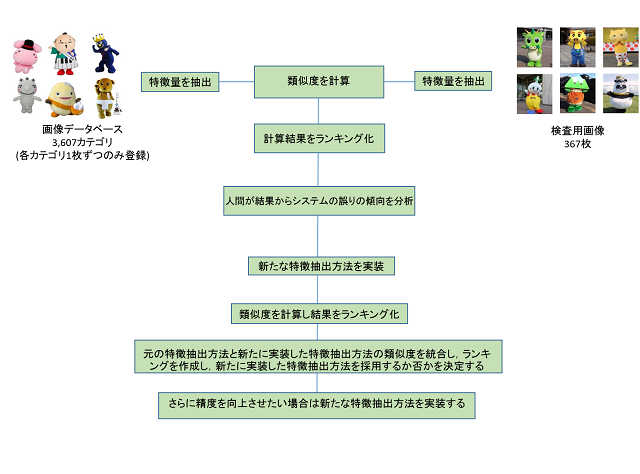
| IS1-A4 | キャラクター認識のためのデータベース構築と特徴抽出 |
| 渡辺 一樹, 新井 大貴, 植木 一也(明星大) | |
| 概要:本稿では,画像認識システムの構築において,カテゴリ数が日々増加し,かつ,一つのカテゴリに対する大量のデータの収集が困難である状況であっても,高精度に認識可能なワンショット学習の手法を検討した.画像認識システムの例として,キャラクター認識を例にとり,ディープラーニングによって大規模画像データベースを学習したモデルを用いた特徴抽出方法や,人が手作業で構築した特徴抽出方法など,複数の手法を組み合わせることにより,比較的容易に画像識別精度の向上が可能であることを,実験により確認することができた. | |
| キーワード:ワンショット学習,特徴抽出,特徴抽出方法の統合 | |
| |
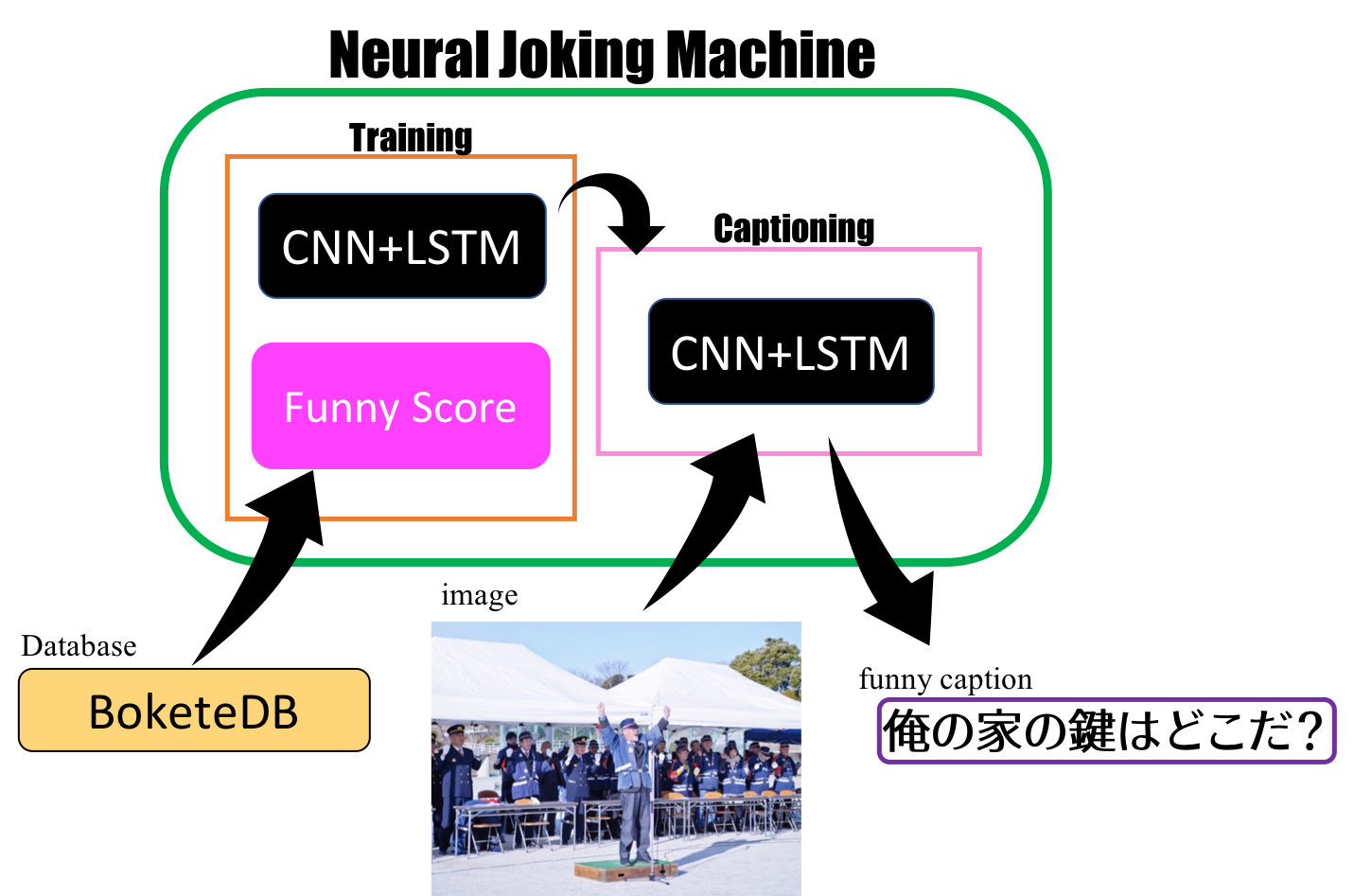
| IS1-A5 | Neural Joking Machine : 師匠たちから笑いの伝授 |
| (OS1-H3) | 吉田 光太(東京電機大), 美濃口 宗尊(東京電機大, 産総研), 螺良 和樹, 中村 明生(東京電機大), 片岡 裕雄(産総研) |
| 概要:本報では笑いを引き出すためのキャプション生成手法を提案し,データベース整備及び性能評価を目的とする.キャプション生成手法はCNN+LSTM の枠組みに,評価に応じて重みを変えるFunny Score を導入し,Neural Joking Machine(NJM) とした.大喜利web サイト「ボケて」からお題(画像) とボケ(テキスト) を収集したデータベースBoketeDB を構築する.このデータベースを「師匠」として学習しキャプションを生成する.アンケートの結果から,NJM の生成キャプションは人間のボケには劣るが,面白いとの評価を一定数獲得できた. | |
| キーワード:笑い,画像キャプション,データベース構築 | |
| |
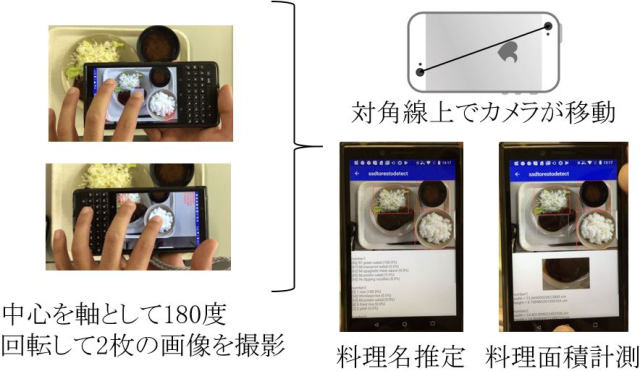
| IS1-A6 | スマートフォンを用いた料理画像からの料理名と料理量の推定 |
| 國枝 滉, 加藤 大貴, 大橋 剛介(静岡大) | |
| 概要:近年,健康志向の浸透により,料理中のカロリーや糖質量,GI値等の値に注目が集まっており,また,SNSの普及により,料理画像がインターネット上に大量に蓄積されている.一方,画像処理分野ではConvolutional Neural Network (CNN) を用いた手法が注目されており,クラス分類や物体検出のタスクにおいて,高い精度を発揮している.そこで本研究では,料理画像からCNNと画像処理を用いて料理名と料理量をスマートフォン上で推定するシステムを構築した. | |
| キーワード:CNN、料理画像、スマートフォン | |
| |
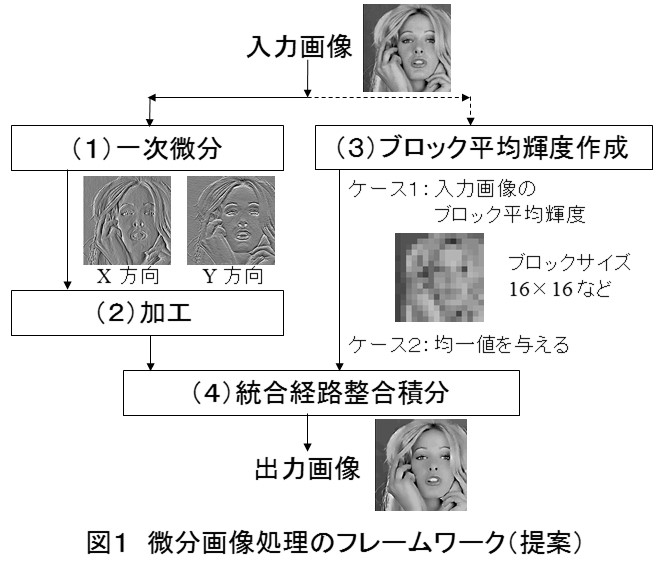
| IS1-A7 | 統合経路整合積分による微分画像処理 |
| (OS1-H4) | 田口 順一(日立製作所) |
| 概要:微分画像処理と呼ぶ新しい画像処理のフレームワークを提案する.画像を微分し,微分画像を加工して,提案法の統合経路整合積分を用いて画像再構成する.微分画像の加工の仕方,および統合経路整合積分に用いるブロック平均値の与え方で様々な機能を持つ処理となる.統合経路整合積分を用意すると,微分画像の強度を変更する単純な処理で,エッジ保存平坦化,局所コントラスト向上,2値化容易化,濃淡錯視の再現の効果が得られた. | |
| キーワード:一次微分画像,積分,画像処理フレームワーク | |
| |
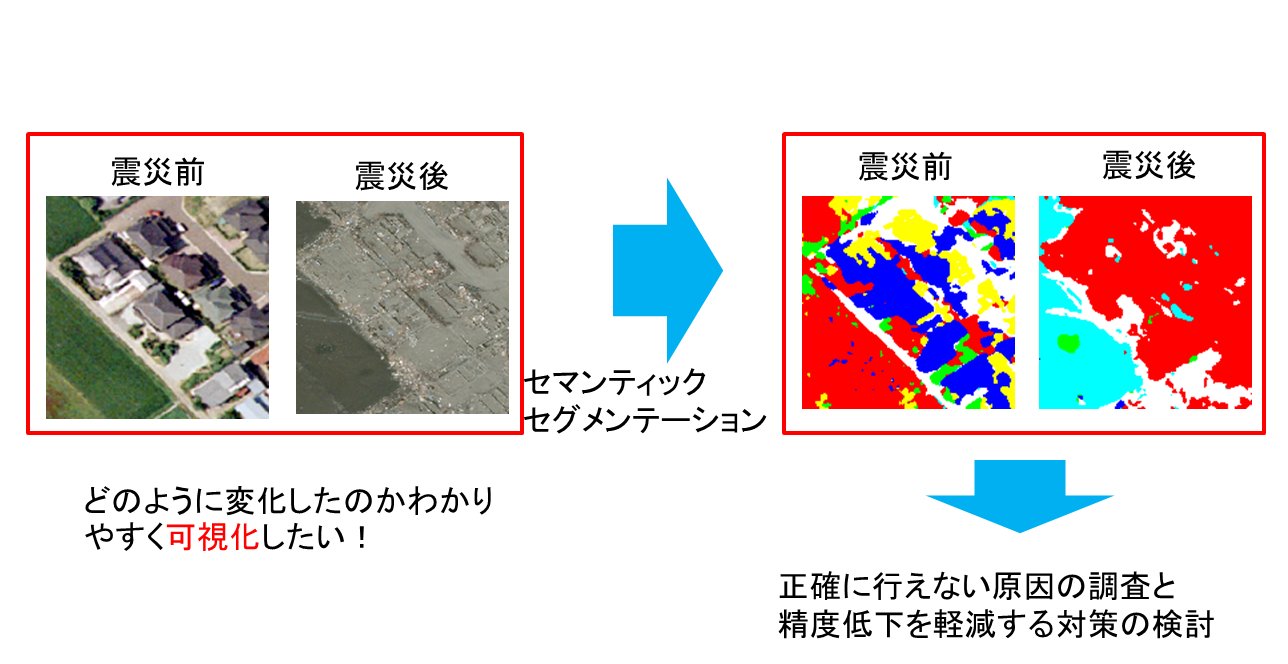
| IS1-A8 | セマンティックセグメンテーションを用いた震災地の環境変化の可視化 |
| 相澤 勇斗, 桑原 明栄子, 植木 一也(明星大) | |
| 概要:本稿ではセマンティックセグメンテーションの技術を利用して,震災地の環境変化を分かりやすく可視化することを提案する.学習する画像データにはISPRS benchmark dataset,評価する画像データにはABCD datasetを利用し,U-Netを用いてセマンティックセグメンテーションを行った.実験により,2つのデータベース間の相違点により,セグメンテーションが正確に行えないことがわかったため,その原因の調査と,精度低下を軽減する施策を行い,精度の向上を図った. | |
| キーワード:セマンティックセグメンテーション、U-Net、可視化 | |
| |
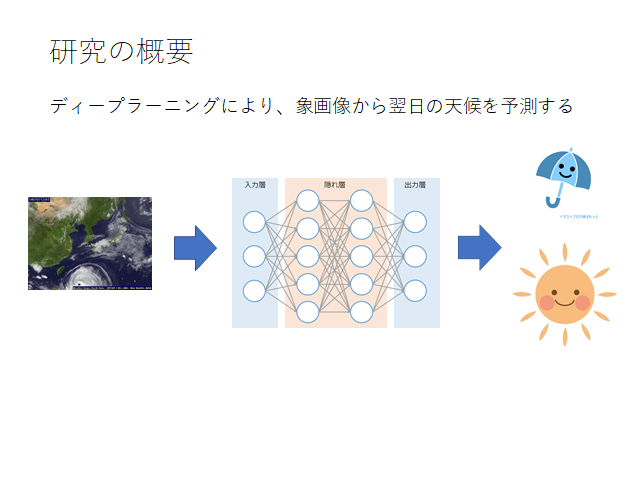
| IS1-A9 | deep learningによる降水予測 |
| 宗石 盛秀, 桑原 明栄子, 植木 一也(明星大) | |
| 概要:現在の天候予測技術は,膨大なコストと時間がかかる.しかし現在に至るまで,大きな予測の改善は実現できていない.そこで,ディープラーニング技術も用いて気象画像から天候予測を行い,予測精度の改善につながらないか考えた.予測実験は回帰モデルと識別モデルを用いて降水量の予測を行い,2つのモデルの結果を組み合わせることでより高い精度を目指した.実験の結果,モデルを組み合わせることで予測の精度を向上させることができた. | |
| キーワード:降水予測、回帰モデル、識別モデル、モデルの統合 | |
| |
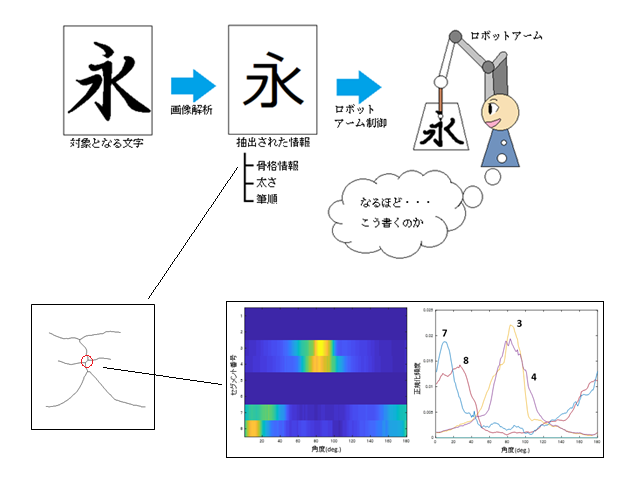
| IS1-A10 | 書道作品における文字のストローク解析に関する検討 |
| 木村 昂太郎, 小田 尚樹, 青木 広宙(千歳科技大) | |
| 概要:書道の学習において、指導者の書字動作を学習者が見て参考にするという方法は有効であると考えられている。そこでわれわれは、古典作品の書字動作をロボットアームが再現し、学習者がロボットアームの動作を見ることで、運筆やリズムなどの手本からは読み取りにくい書字動作をイメージすることを支援するためのシステムの開発を目指すこととした。本稿では、作品の画像から筆順の自動生成を行うための第一歩として、文字のストロークの決定を行った。 | |
| キーワード:文字画像,ストローク解析,方向フィルタ,書道教育 | |
| |
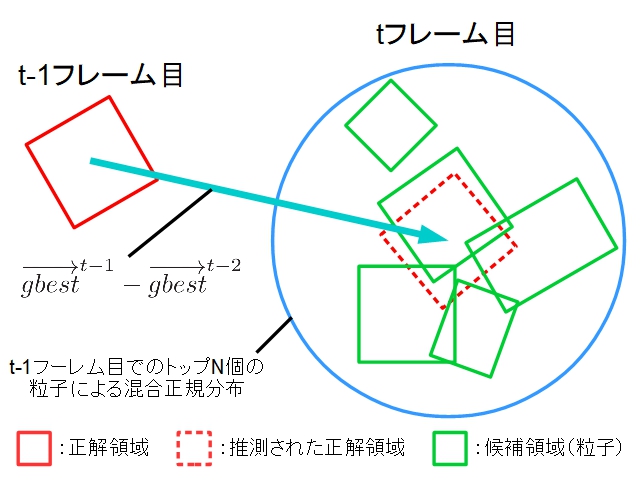
| IS1-A11 | 低フレーム動画における粒子群最適化を用いた追跡アルゴリズムの改良 |
| 中根 拓未, 五十嵐 泰智(福井大), 明石 卓也(岩手大), 張 潮(福井大) | |
| 概要:本研究では粒子群最適化を使用したテンプレートマッチングを用いて低フレーム動画での物体追跡を行う.低フレーム動画による対象の急な動きに対応するために,前2フレームの結果から現フレームの状態が推定される.推定結果は優良な粒子による混合正規分布と組み合わせて粒子の初期化に利用される.実験では人工的に作成したシーケンスと実環境における動画を対象に物体追跡を行い,提案手法の有効性を示す. | |
| キーワード:物体追跡、テンプレートマッチング、粒子群最適化 | |
| |
| IS1-B メディア・映像(1) | |
| IS1-B1 | フローヒストグラムを用いたRecurrent Neural Networkによる自己移動量推定 |
| (OS2-H1) | 阿知破 千浩, 福井 宏, 山下 隆義, 藤吉 弘亘(中部大) |
| 概要:自動運転支援において,自車の位置や運動を把握することは重要て゛ある.Convolutional-Recurrent Ne ural Network(C-RNN)は,画像から自己運動の識別か゛可能て゛ある.一方て゛,C-RNNは詳細な自己移動量の推 定か゛て゛きないという問題か゛ある.そこて゛本研究て゛は,C-RNNを自己移動量推定に拡張する.その際,シーンに 頑健な推定か゛可能となる入力方法としてフローヒストク゛ラムを用いる.評価実験の結果,従来のRNNより高精度 に自己移動量の推定か゛可能なことを確認した. | |
| キーワード:自己移動量推定、Recurrent Neural Network、フローヒストグラム | |
| |
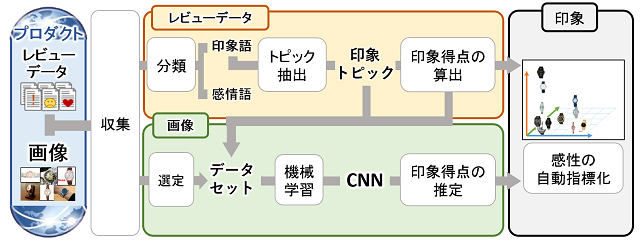
| IS1-B2 | CNNおよびテキストマイニングを用いたプロダクト画像の印象推定 |
| 鈴木 秀通, 山田 篤拓, 飛谷 謙介, 橋本 翔, 長田 典子(関西学院大) | |
| 概要:本研究では感性の自動指標化を目的とし,プロダクトの画像とレビューデータからのプロダクトの印象推定手法を提案する.手法は(1)レビューデータからテキストマイニングを用いた評価表現辞書に基づく感性の指標化,(2) 得られた印象とプロダクト画像からの機械学習用画像データセットの作成,(3)構築したCNNによるレビューが不十分なプロダクトの印象推定,から構成される.本手法を腕時計のデータに適用した結果,人の評価得点との高い相関が確認され手法の有効性が示された. | |
| キーワード:機械学習,テキストマイニング,感性,自動指標化 | |
| |
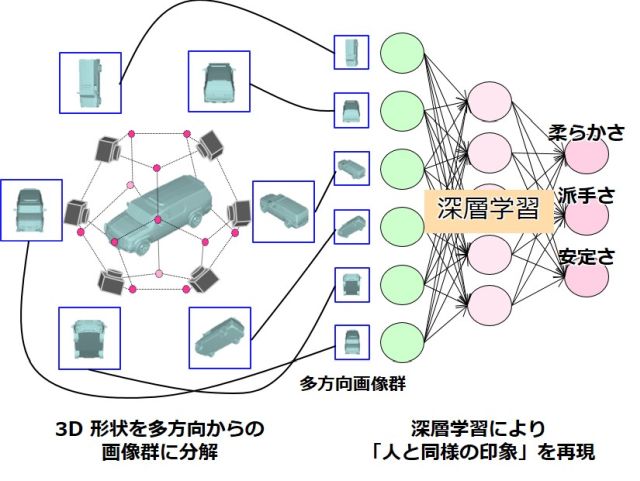
| IS1-B3 | 多視点画像統合による3次元物体と感性的印象のマッピング |
| 田口 皓一, 橋本 学(中京大), 飛谷 謙介, 長田 典子(関西学院大) | |
| 概要:本研究では,人が物体形状から感じる印象(感性的印象)を推定する手法を提案する.3Dプリンタを用いた家庭におけるものづくりを促進するために,直感的な3Dモデル設計システムが求められる.このシステムを実現するためには,感性的印象(心理的要因)と物体形状(物理的要因)を対応づける必要がある.本研究では,3Dモデルを複数の視点から撮影した画像によるDeep Neural Network(DNN)を用いて,各感性的印象を推定する.実験の結果,感性的印象の推定結果と教師信号に相関関係があることを確認した. | |
| キーワード:パーソナルファブリケーション,主観評価実験,3次元形状 | |
| |
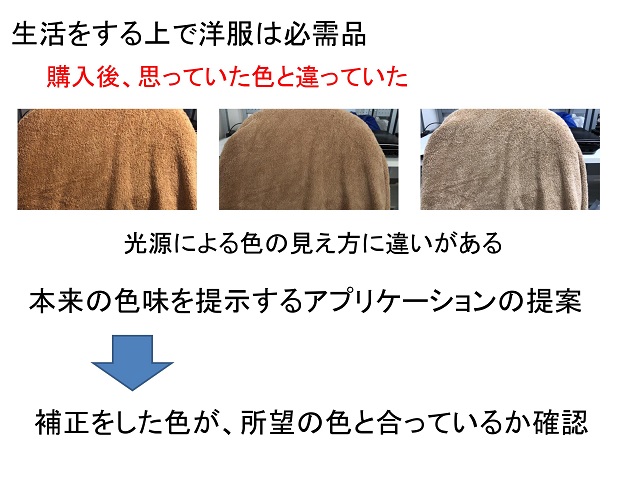
| IS1-B4 | 色の見え方に考慮した衣類選択支援システムの一考察 |
| 菅井 悠平, 植木 一也, 桑原 明栄子(明星大) | |
| 概要:私たちが生活する上で必需品である洋服は,購入後に思っていた色と違っていたということがある.光源による色の見え方に違いがあるのが原因の一つとして挙げられ,店舗と家では使用している照明が異なるため,光色の影響により色が変わって見える.本論文では,光源による色の見え方の差異を判定し,本来の色味を提示するアプリケーションを提案および考察を行う.光源による影響を判断し,購入対象の色が所望の色に合っているか確認する.そのことにより,正しい色での衣類選択を支援する一助となると考える. | |
| キーワード:光色、色の見え方、色評価 | |
| |
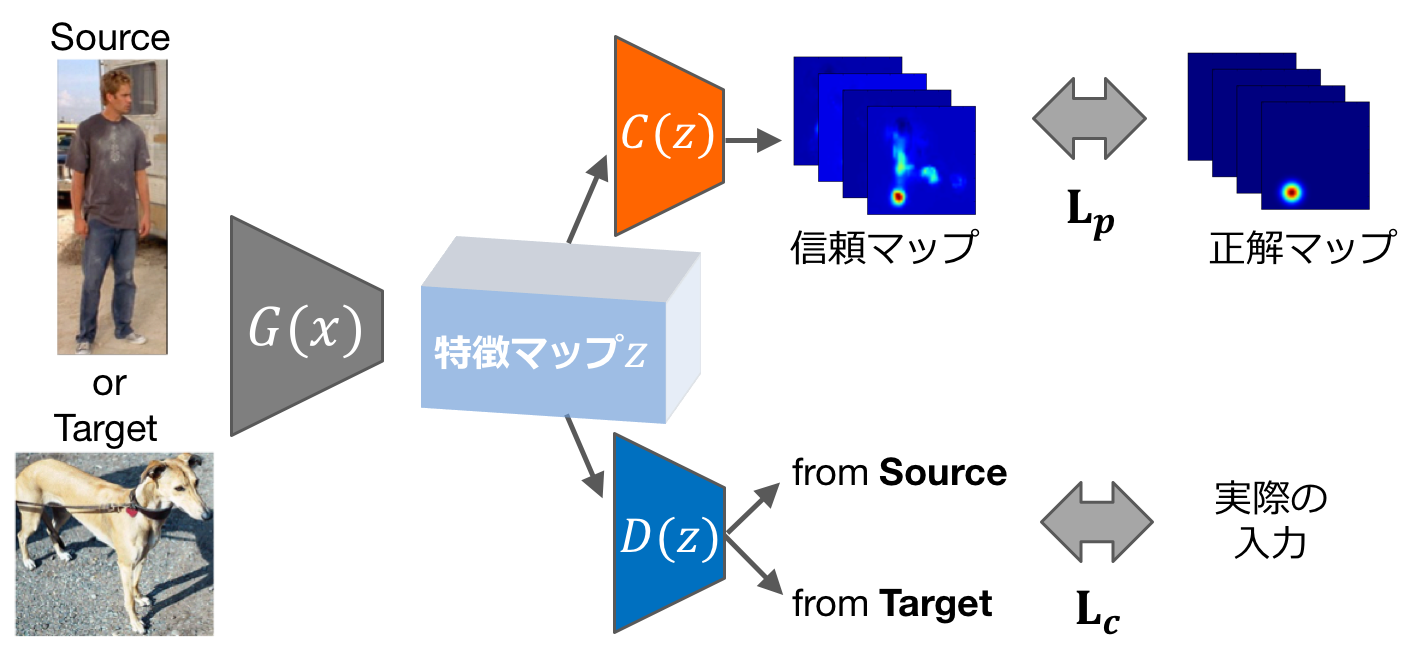
| IS1-B5 | 敵対的学習を用いた2次元姿勢推定における教師なしドメイン適応 |
| (OS2-H2) | 鈴木 智之(慶應大), 田中 希武(コニカミノルタ), 青木 義満(慶應大) |
| 概要:Convolutional Neural Networkと大量の教師ありデータにより2次元姿勢推定のベンチマークデータセットにおける精度向上は著しいが,ドメイン(撮影環境・推定対象)の変化による推定精度の低下は依然として大きな課題である.本研究では,敵対的学習を用いたドメイン適応を特徴マップの座標単位で行う手法を提案し,教師がないドメインの姿勢推定精度の改善を行った. | |
| キーワード:ドメイン適応,姿勢推定,敵対的学習,Convolutional Neural Network | |
| |
| IS1-B6 | 映像情報からのサッカーインサイドキック採点システムの基礎検討 -外観情報および姿勢情報を用いた解析手法の比較・検討- |
| 松崎 優太, 池谷 拓夢, 中村 明生(東京電機大) | |
| 概要:サッカー個人基本技能の熟達支援システム開発のために,2018年現在最先端の手法を用いた熟達評価手法の提案と比較・検討を行う.外観情報に基づく手法として3D ResNet,姿勢情報に基づく手法としてOpenPose, 3d-pose-baselineを応用し,インサイドキック動作の解析を行った.SVRを用いてインサイドキック動作の採点を行い,従来手法と比べコーチの採点精度に近くなることを確認した. | |
| キーワード:熟達支援システム、行動解析、3D CNN、Open Pose | |
| |
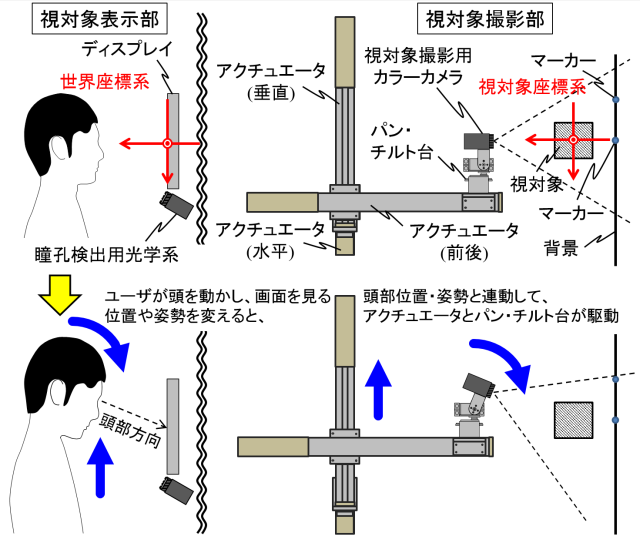
| IS1-B7 | カメラ姿勢を頭部姿勢に連動させた遠隔視対象物体の鑑賞システムの提案 |
| 福元 清剛, 内田 和希, 海老澤 嘉伸(静岡大) | |
| 概要:本研究室では,瞳孔検出技術にマジックミラー等を組み合わせた視線一致型コミュニケーションシステムを提案した.このシステムでは,ユーザが頭部を大きく移動させても,そこから歪みのない画像が見えるように画像を歪ませた.本研究では,この技術を応用し,遠隔地にある美術品等を鑑賞できるシステムを試作した.視対象を撮影するカラーカメラの位置と姿勢を,ユーザ頭部の位置と姿勢に一致させるように連動制御することで,視対象をさまざまな方向から観察可能とした.また,視対象の背景に設置したマーカーを用いた画像のぶれ補正や,実物大への拡大,歪みのない画像を観察できる技術も導入した. | |
| キーワード:瞳孔検出、3次元座標、射影変換、座標変換 | |
| |
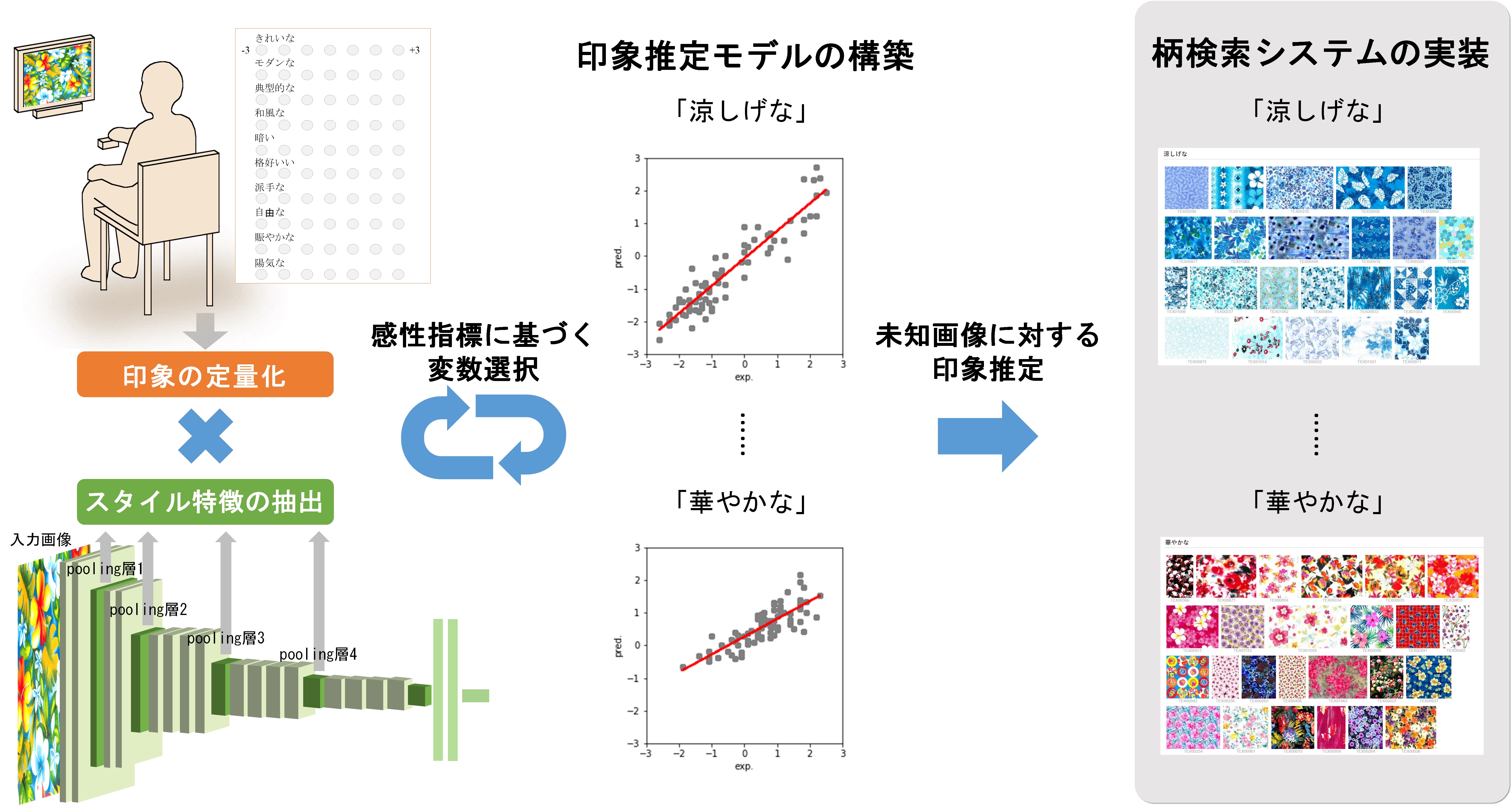
| IS1-B8 | CNNのスタイル特徴と感性指標に基づく印象推定モデルと柄検索システム |
| 寸田 菜月, 飛谷 謙介, 竹本 敦, 谷 伊織, 谿 雄祐, 藤原 大志, 長田 典子(関西学院大),森田 修史(クチュールデジタル) | |
| 概要:本研究では,衣服の柄を対象とした印象推定モデルを構築し,それを応用して柄検索システムを実装した.まず,主観評価実験により柄に対する印象を定量化し,CNNを用いて抽出した柄画像のスタイル特徴との関係性をモデル化した.その結果,少量の印象値付きデータから汎化性の高い印象推定モデルが得られた.そして,印象値が未知である大量の画像セットに対して印象の推定を行い,その結果をもとに柄検索システムを実装した. | |
| キーワード:ファッション,CNN, テクスチャ,スタイル転写,Lasso回帰 | |
| |
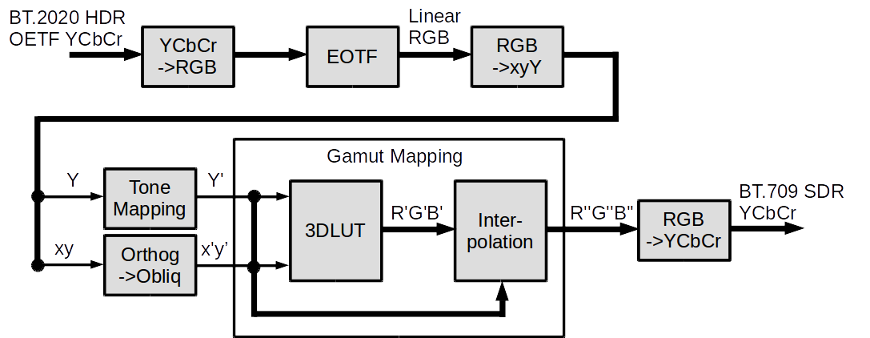
| IS1-B9 | HDR広色域映像のための色再現性を考慮した色域トーンマッピング |
| 松永 力, 趙 延軍(朋栄) | |
| 概要:ハイダイナミックレンジ(HDR)広色域映像を標準ダイナミックレンジ(SDR)狭色域映像へ変換するために色再現性を考慮した色域トーンマッピング処理を行う.トーンマッピング(TM)処理の結果の輝度値Yと入力HDR画像におけるxy値に対して,色域マッピング処理を行う.色域マッピング処理では,均等色空間である CIELUV表色系をHDR拡張したhdr-CIELUV表色系において,色相毎に明度を保存して,彩度に対してソフトクリップ処理する明度保存色域マッピング処理を3次元ルックアップテーブル(3DLUT)補間により計算する. | |
| キーワード:HDR,広色域,CIELAB/CIELUV/hdr-CIELAB/hdr-CIELUV表色系,Reinhardグローバル TM,明度保存色域マッピング,ガマット誤差,3DLUT補間,ソフトクリップ/ソフトニー関数,斜交座標 | |
| |
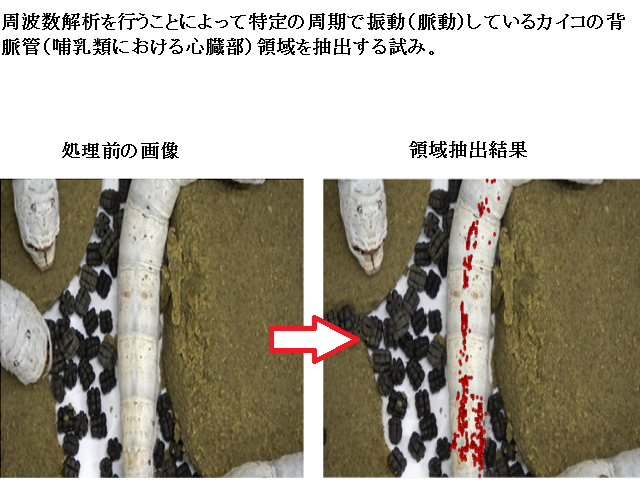
| IS1-B10 | カイコの脈拍状態推定のための背脈管領域抽出の試み |
| 河野 亮太, 下尾 陽子, 右田 雅裕, 太田 広人, 戸田 真志(熊本大) | |
| 概要: 本研究は、カイコの背脈管(哺乳類における心臓)を撮影した動画を用いて カイコの背脈管の領域を抽出し、心拍データを測定することの自動化を目的として いる。カイコの拍動により動画上のある画素値にあらわれる輝度値の時間変化が周 期性を持つと仮定した上で、周波数解析を行うことにより背脈管の領域を抽出する 方法を提案する。また、得られた背脈管領域から取得できる情報が、動物実験の観 点においてどのような意味を持つのかについての考察を行っていく。 | |
| キーワード:動物実験、自動化、周波数解析 | |
| |
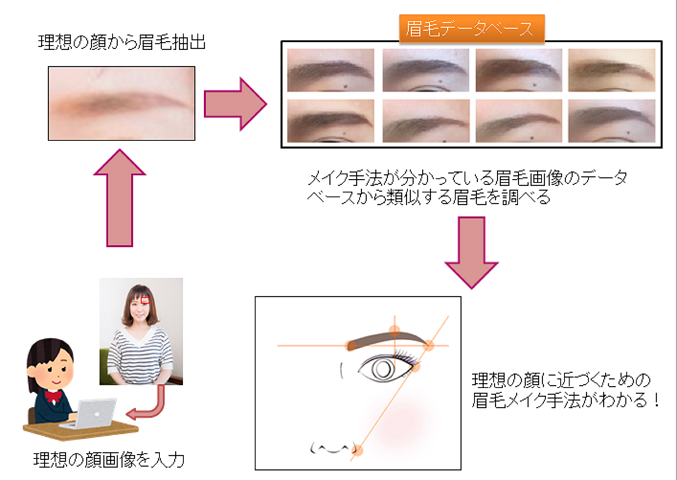
| IS1-B11 | 理想の顔に近づけるための眉毛のメイクアップ提案システム |
| 幸田 静絵, 桑原 明栄子, 植木 一也(明星大) | |
| 概要:現在日本では,多くの女性が日常的にメイクをしている.顔のパーツの中でも大きく印象を左右する部分は眉毛であると言われているが,同時に多くの女性が苦手とするメイクの際のパーツも眉毛であることが明らかになっている.本稿では,理想の顔に近づくための眉毛のメイクアップ支援システムを提案する.そのためにまず,メイク手法が明らかになっている眉毛画像のデータベースを作成した.次に,自身が理想とする顔の画像から眉毛パーツの抽出を行う.抽出されたパーツからのデータベース検索を行うことで,自身が理想の顔に近づくための眉毛メイクの手法が明らかとなる. | |
| キーワード:メイクアップ、顔部品検出、類似画像検索 | |
| |

| IS1-C 産業応用(1) | |
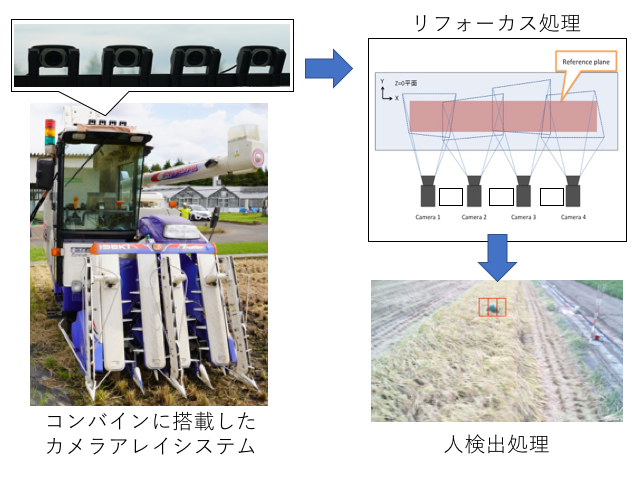
| IS1-C1 | 透視投影リフォーカスを用いた圃場環境における人物検出 |
| 岩田 健司, 鈴木 亮太, 片岡 裕雄, 佐藤 雄隆(産総研) | |
| 概要:近年,農業自動化へのニーズが高まっている中で,圃場内で作業をしている人物との予期せぬ接触事故が危惧される.人物検出にカメラを用いる場合,農地特有の障害物による遮蔽が画像特徴量に悪影響を及ぼす問題がある.そこで,稲などの穀草が人物の大部分を遮蔽している環境下において,カメラアレイシステムを用いたリフォーカス処理を用いた人検出システムを開発している.コンバインにシステムを搭載し,実地にて検証を実施した. | |
| キーワード:人物検出,カメラアレイ,リフォーカス | |
| |
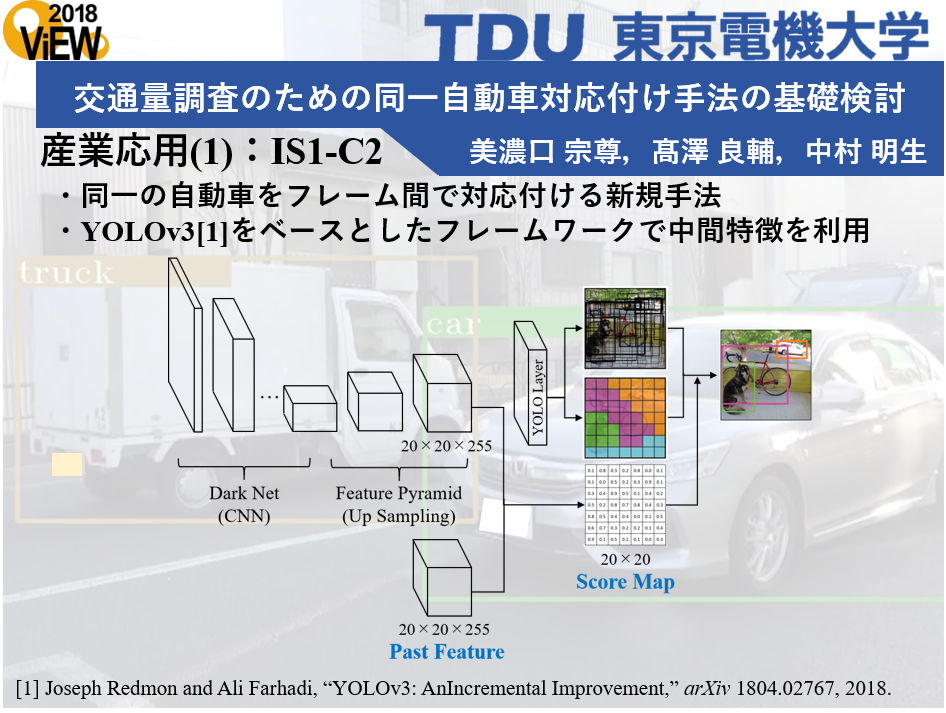
| IS1-C2 | 交通量調査のための同一自動車対応付け手法の基礎検討 |
| 美濃口 宗尊, 髙澤 良輔, 中村 明生(東京電機大) | |
| 概要:交通量調査のための同一自動車対応付け手法を提案する.物体検出手法であるYou Only Look Once v3(YOLOv3)で動画のフレームごとに自動車を検出し,検出した同一の自動車を複数回カウントしないように対応付けを行う.現在フレームと過去フレームにおける,YOLOv3の中間出力を利用し,領域ごとの差分を取ることで提案手法であるScore Mapを算出する.Score Mapを用いて,過去フレームと現在フレームで検出した自動車の組み合わせごとにスコアを算出し,スコアが高い組み合わせから対応付ける.実験では,実際にカメラを歩道に設置し,撮影した映像で評価した.太陽光の影響によっては車種の識別精度が低下するが,全ての車種をカウントした場合では98%のカウント率となり,本手法の有効性を示唆した. | |
| キーワード:交通量調査,物体検出,物体追跡 | |
| |
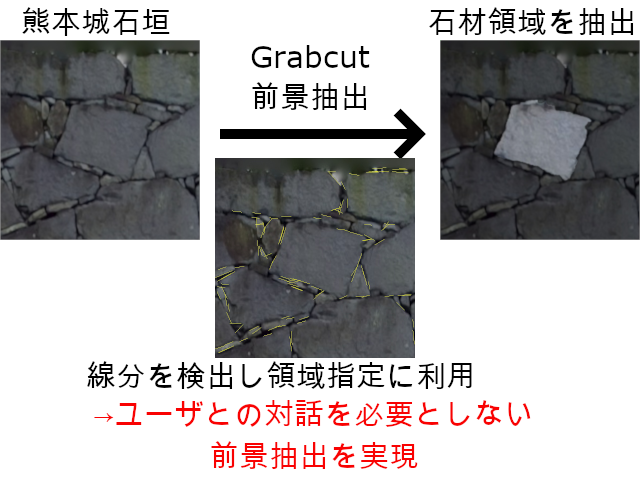
| IS1-C3 | GrabCutと線分検出の組み合わせによる熊本城石垣領域抽出 |
| 山崎 雄喜, 井上 健太郎, 右田 雅裕, 上瀧 剛, 戸田 真志(熊本大), 岸上 剛士(凸版印刷) | |
| 概要:本研究は熊本震災復興プロジェクトのひとつである.地震により崩落した石垣の各石材の元の位置を特定するために,輪郭情報を使用する.石材輪郭抽出のために石垣画像から石材領域を前景として抽出する.前景抽出にGrabcutを用いるが数多くある石材をユーザが細かく領域指定する作業は負担なので自動化を試みる.石材の輪郭は直線性が高いという性質を利用し検出した線分を背景領域の指定に利用することで自動で石材領域を抽出する手法を提案する. | |
| キーワード:震災復興支援、グラフカット、ハフ変換 | |
| |
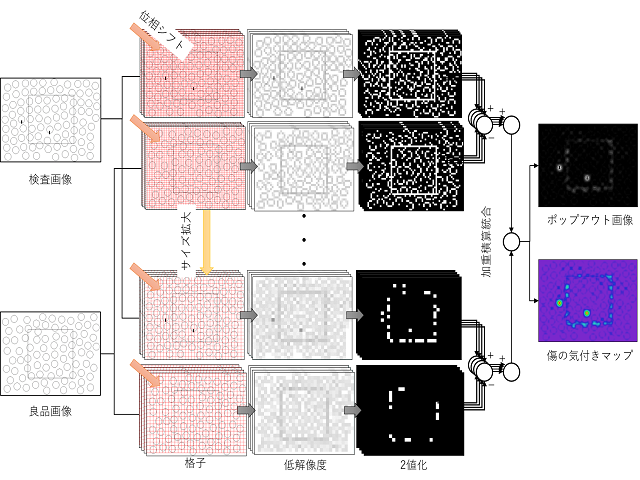
| IS1-C4 | 外観検査における良品特徴抑制の検討 |
| 羽田野 博文, 大野 光津弘, 山本 凌太, 青木 公也(中京大) | |
| 概要:外観・目視検査の自動化において,良品サンプルとの比較による検査は一般的である.しかし,基準画像を事前に用意することや,厳密な位置合わせが必要であること,個体毎の特徴の違いへの対応については様々な工夫を要する.一方,本研究では,良品画像と検査画像を入力するだけで,撮像時の多少の位置ずれに対応し,ワーク素地の違い等良品の個体差は検出せず,ワーク固有の局所的な特徴の検出は抑制し,かつ傷・欠陥領域候補の検出を可能とすること手法を提案する.いくつかの典型的な例で,提案手法の有効性が確認できたので報告する. | |
| キーワード:傷の気付き処理、 外観検査、 目視検査、 画像検査、自働化 | |
| |
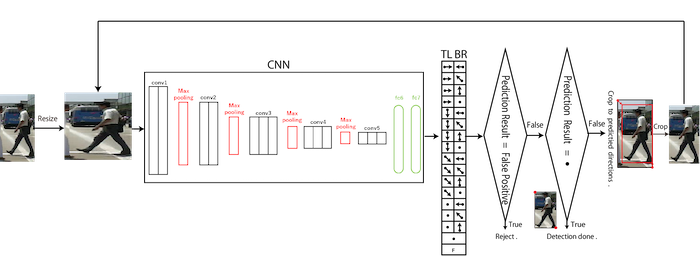
| IS1-C5 | 物流現場画像における人検出手法の比較と精度向上対策案の検証 |
| 岡山 健, 古室 達也, 加藤 紀彦, 片岡 裕雄(産総研) | |
| 概要:物流現場における人を検出するため,物流現場データセットを構築しFaster R-CNNとSSDにてAPの比較を行った.結果,Faster R-CNNに比べSSDのAPが大きく劣ることが分かった.その原因を調査し,物流現場データセットではPascal VOCのような公開データセットに比べて人の見えが小さいため,SSDの処理内に含まれるリサイズ処理によって人の見えが潰れてしまうことが原因と判明した.そこで,リサイズによる画像サイズの変更ではなく,画像を切り出す処理にしたところAPが向上した. | |
| キーワード:人検出、物流現場、SSD | |
| |
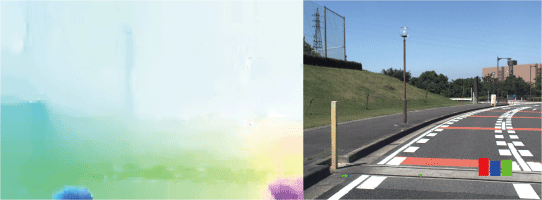
| IS1-C6 | セマンティックセグメンテーションを用いた道路上の動物検出精度向上 |
| 東 祐都, 桑原 明栄子, 植木 一也(明星大) | |
| 概要:本稿では,最近開発が進み注目されている自動運転車の問題の一つである交通事故に注目し,それを回避する方法を提案し検証した.検出対象として街中にも多くおり予想の難しい動きをする動物の犬と猫に対象とし,セマンティックセグメンテーションを用いて自動検出できるかの実験を行なった.Cambridge-driving Labeled Video Databaseを利用し,画像に犬や猫の画像を合成することにより,学習する画像を作成し,その有効性を検証した. | |
| キーワード:セマンティックセグメンテーション、自動運転、chainercv | |
| |
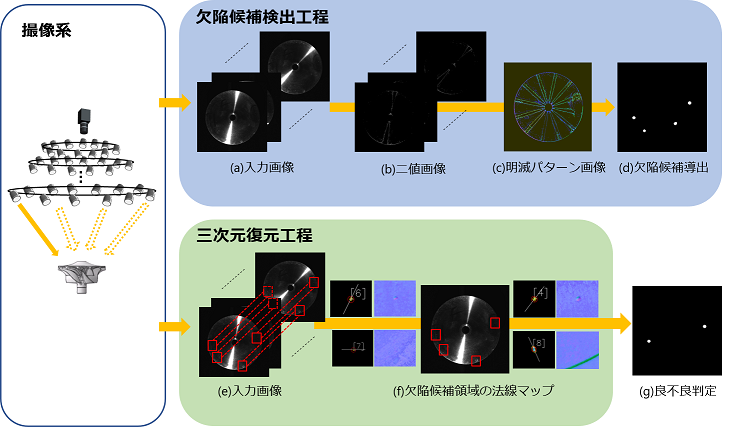
| IS1-C7 | 多方向照明画像による小型金属部品の微小凹凸欠陥検出手法の検討 |
| 山腰 朋城, 伊藤 純, 青木 公也(中京大), 輿水 大和, 三和田 靖彦(YYCソリューション), 鈴木 一将(IHI), 町田 賢一郎, 福井 達也, 向井 崇裕(IHIターボ) | |
| 概要:工業製品において,金属光沢面に発生する微小凹凸欠陥は,照明条件またはカメラ位置によって視認性が変化するため,外観検査自動化が困難な対象である.また特に,精密部品については欠陥の有無だけでなく,その定量評価が必要とされる場合がある.本研究では先ず,照明条件を変化させた複数枚の画像を用いて,凹凸欠陥のひかり方のパターンから欠陥候補を検出する.さらに,同じ撮像系を用いて,前段で検出した欠陥候補に限定して三次元復元する.以上より,三次元復元の問題点である処理コストを低減した凹凸欠陥の定量評価が可能な 2D と 3D の画像処理を組み合わせた外観検査システムを提案する.実験の結果,凹凸欠陥候補の検出においては過検出であったものが,三次元復元により削減でき得ることを確認した. | |
| キーワード:外観検査、微小凹凸欠陥、照度差ステレオ法 | |
| |


| IS1-D ロボット・3次元・計測(1) | |
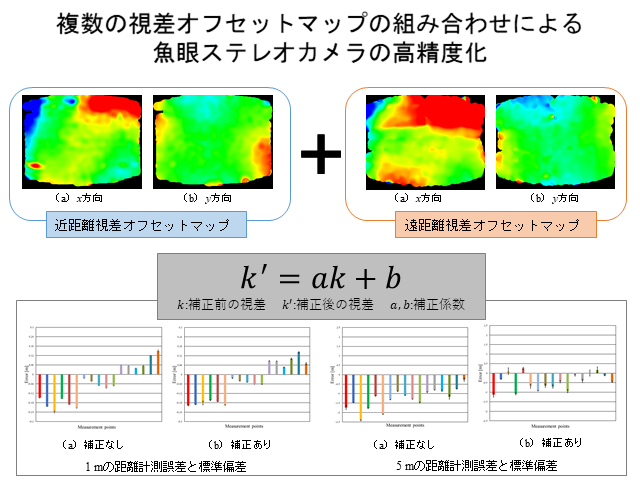
| IS1-D1 | 複数の視差オフセットマップの組み合わせによる魚眼ステレオカメラの高精度化 |
| 凌 佳怡, 飯田 浩貴, 池 勇勳, 梅田 和昇(中央大), 大橋 明, 福田 大輔, 金子 修造, 村山 純哉, 内田 吉孝(クラリオン) |
|
| 概要:本論文では,半径1 mの半円面である近距離用のキャリブレーションターゲットを構築し,色情報を用いてターゲットの特徴点の抽出とマッチングを行い,近距離視差オフセットマップを作成する手法を提案する.また,遠距離と近距離の視差オフセットマップの組み合わせにより視差を補正し,魚眼ステレオカメラ距離計測の高精度化を行う. | |
| キーワード:魚眼ステレオカメラ、視差オフセットマップ、距離計測の高精度化 | |
| |
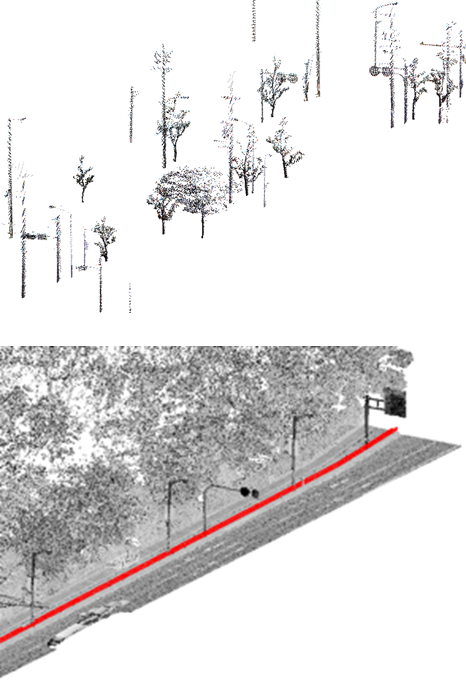
| IS1-D2 | 点群と画像を用いた道路周辺地物の自動抽出 |
| 森 悠真, 増田 宏(電通大) | |
| 概要:移動計測装置(MMS) により取得される点群や画像には様々な地物が含まれているため,それらを種別ごとに自動で抽出することが求められる.しかし,点群のみを用いた手法では,類似した形状を誤認識することがある.また,画像のみを用いた手法では,見え方の違いや逆光などのために誤認識することがある.そこで本研究では,点群と画像の両方を用いて,地物の抽出と分類を行うことを考える.実測データを用いた評価実験では,点群と画像の特徴量を組み合わせた提案手法により,認識率が向上することを示した. | |
| キーワード:移動計測,点群,画像,物体認識 | |
| |
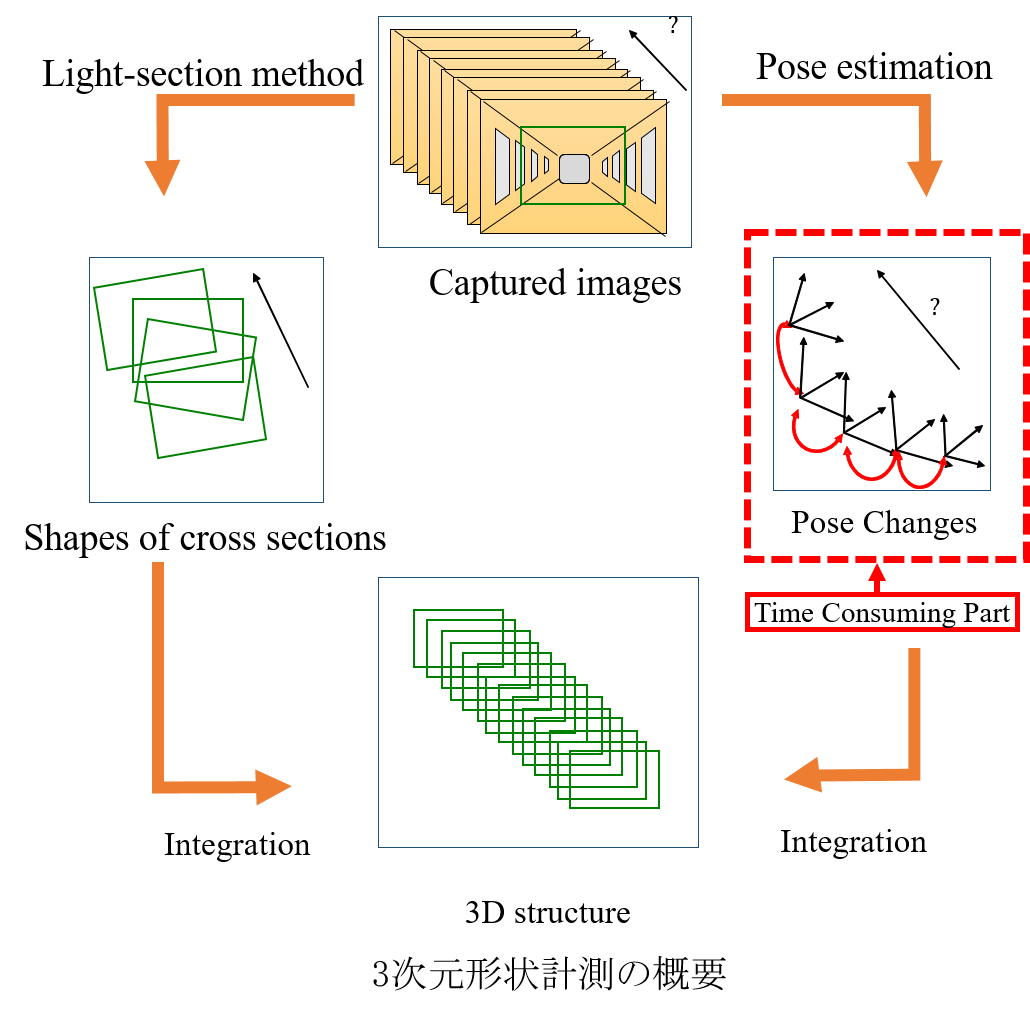
| IS1-D3 | 全周レーザとカメラを用いた大型長尺物の3次元形状計測のためのFFTによるテンプレートマッチングの高速化 |
| 川田 桃子, 樋口 寛(東京大), 藤井 浩光(千葉工大), 谷口 敦史, 渡辺 正浩(日立製作所), 山下 淳, 淺間 一(東京大) | |
| 概要:本研究では,大型長尺物のための光切断法を用いた3次元形状計測を高速化する手法を提案する.光切断法で得た各切断面の統合手法として環境中のテクスチャ情報を用いる手法がある.しかし,この手法では,長い計算時間が課題である.そこで,多くを占めている移動量推定のための対応点検出の計算時間短縮を目的とした.対応点検出の際には,レーザ光の影響を防ぐために該当部分をマスクする必要があるため,マスクを考慮したFFTによる高速なテンプレートマッチングを導入し高速化を図った.実験によって,従来手法に比べ全体の計算時間が6%に短縮し,提案手法が3次元形状計測の高速化に有効であることが分かった. | |
| キーワード:3次元計測,光切断法,FFT | |
| |
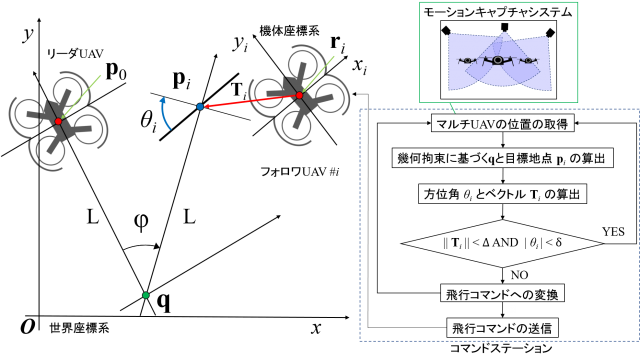
| IS1-D4 | マルチUAVを利用した広視野撮影のためのリーダフォロワ編隊制御 |
| 春日井 洸介(愛知県立大), 宮川 勲(NTT), 村上 和人(愛知県立大) | |
| 概要:本稿はマルチUAVの連係を利用した広視野撮影のためのリーダフォロワ編隊制御を提案する.リーダフォロワ編隊では,リーダUAVに複数のフォロワUAVが追従飛行する.提案方法は,広視野撮影のための幾何拘束を用いてフォロワUAVの飛行を適応的に制御する.実験では,提案方法により3機のUAVを使ったデルタ編隊飛行を制御する.提案方法によってリーダフォロワ編隊の3次元軌跡がデルタ編隊飛行を維持しながら飛行すること,並びに従来の編隊飛行と比べて広視野撮影に有効であることを示す. | |
| キーワード:マルチUAV、リーダフォロワ構造、広視野撮影、モーションキャプチャ、編隊飛行 | |
| |
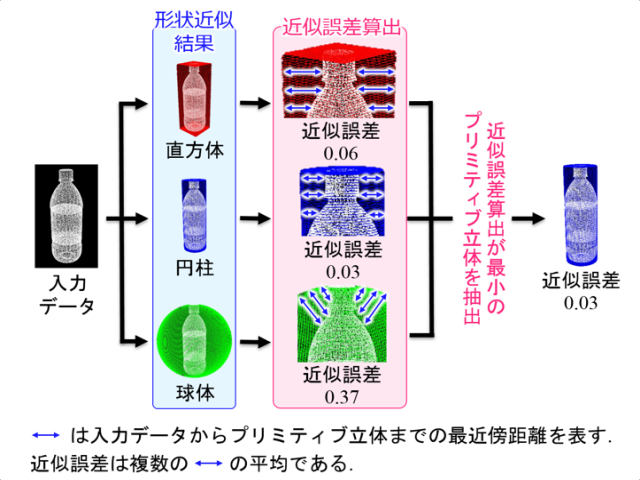
| IS1-D5 | 3種のプリミティブ立体を用いた日用品の形状近似性能に関する実験的調査研究 |
| 村井 俊哉, 鳥居 拓耶, 橋本 学(中京大) | |
| 概要:本稿では直方体,円柱,球体の3種を用いて単一プリミティブ立体で形状近似できる割合を分析する.従来では対象物を単一プリミティブ立体で形状近似したが,単一プリミティブ立体で形状近似できる日用品を確認する必要がある.本研究では日用品とプリミティブ立体の近似誤差を算出し,日用品データセットのうち,単一プリミティブ立体で形状近似できる割合を分析した.分析の結果,近似誤差0.02未満で形状近似できる日用品が638個中28.4%であることがわかった. | |
| キーワード:プリミティブ立体、形状近似、近似誤差 | |
| |
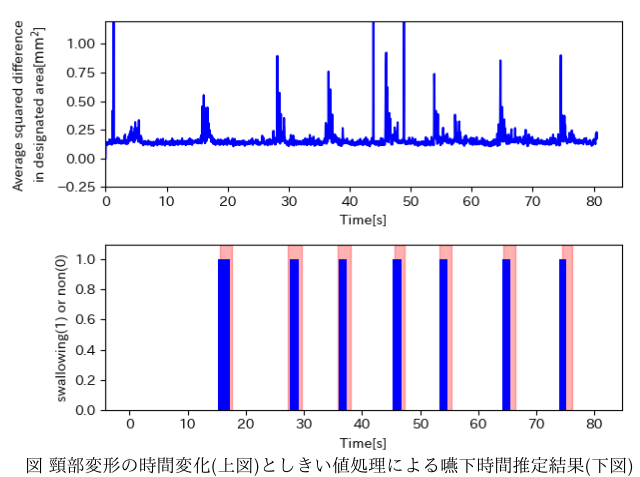
| IS1-D6 | 深度画像の隣接フレーム間差分による嚥下時刻推定 |
| 吉田 淳, 小澤 恵子(滋賀県立大), 森谷 季吉(草津総合病院), 坂本 眞一, 酒井 道, 宮城 茂幸(滋賀県立大) |
|
| 概要:近年高齢化社会の進展に伴い,誤嚥性肺炎による死亡率が増加傾向にある.このため,嚥下評価が必要とされている.深度画像を用いた,非侵襲,非接触かつ安価な嚥下評価手法が着目されている.本研究では頸部正面から深度画像を撮影し,隣接フレームにおいて頸部の指定した範囲で差分をとることにより嚥下の時刻とそれに伴う時間を推定する.喉頭隆起が不明瞭な被験者を含む7名に提案手法を適用した結果,嚥下時刻と嚥下時間のF値はそれぞれ 0.739,0.573 であった. | |
| キーワード:深度画像,嚥下,頸部喉頭隆起 | |
| |
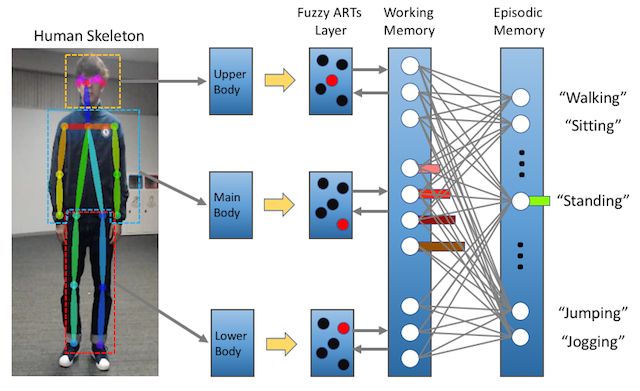
| IS1-D7 | コミュニケーションロボットによる能動的インタラクションのための行動認識 |
| 加藤 薫平, Chin Wei Hong(首都大), 戸田 雄一郎(岡山大), 久保田 直行(首都大) | |
| 概要:本論文では,スケルトンベースの行動学習と認識のための教師なしのエピソード記憶学習モデルを提案する.提案されたモデルであるMcEM-ARTは,短期記憶,作業記憶およびエピソード記憶の3つの層で構成されており,入力として,頭部,上半身,下半身の骨格情報を分けて入力としている.実験として,McEM-ARTが人の骨格情報を用いて10個の行動に対して93.1%の精度で認識できていることを示した. | |
| キーワード:コミュニケーションロボット,適応共鳴理論,行動認識 | |
| |
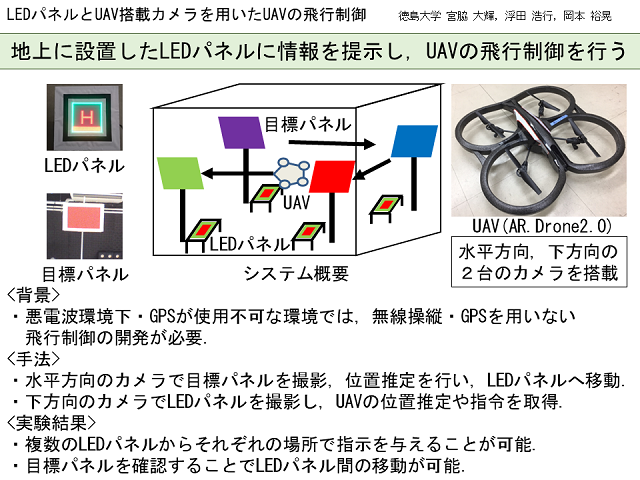
| IS1-D8 | LEDパネルとUAV搭載カメラを用いたUAVの飛行制御 |
| 宮脇 大輝, 浮田 浩行, 岡本 裕晃(徳島大) | |
| 概要:本論文では,LEDパネルを用いた情報伝達によってUAVの飛行制御を行う手法について検討する.具体的にはLEDパネル上にパネル検出のための点滅パターンとUAVへの指令に対応するパターンを同時に表示する.そしてUAV搭載カメラでLEDパネルを撮影し,パネルの検出およびパターン識別を行い,指示を確認する.その後,目標とするパネルを検出することで,次のLEDパネルまで移動し,同様の手順で指示を受け取る.屋内での飛行実験において提案手法によって自律飛行制御が可能であることを確認した. | |
| キーワード:UAV、カメラ、LEDパネル | |
| |
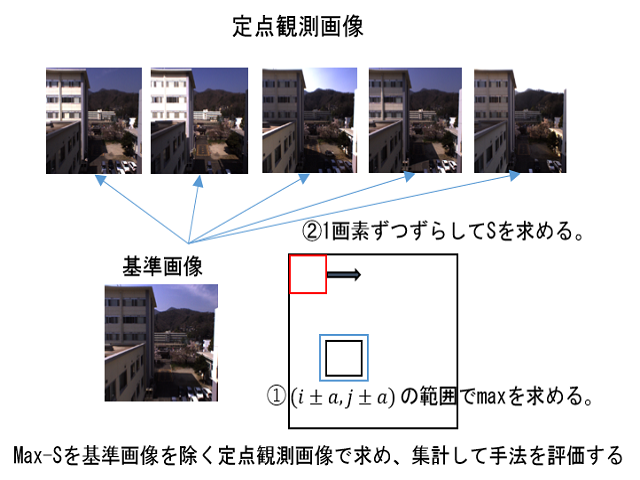
| IS1-D9 | 定点観測画像を用いた風景照合手法の照明変化に対する堅牢性評価 |
| 関口 尚輝(群馬大), 鹿貫 悠多(リバスト), 太田 直哉(群馬大) | |
| 概要:自律走行ロボットがカメラ画像から自己位置推定するためには照明変化に堅牢なマッチング手法が必要となる。現在様々なテンプレートマッチングがある中で照明変化に堅牢かどうかを比較する手法が定まっていない。そこで本稿では定点観測画像を用いた評価手法を提案する。この方法は定点観測画像列を用いて正しい位置のマッチングスコアと異なる場所のスコアの差を統計し、どのような分布になるかを比較して照明変化に堅牢かどうかを評価する手法である。 | |
| キーワード:画像ナビゲーション、テンプレートマッチング、照明変化、評価手法 | |
| |
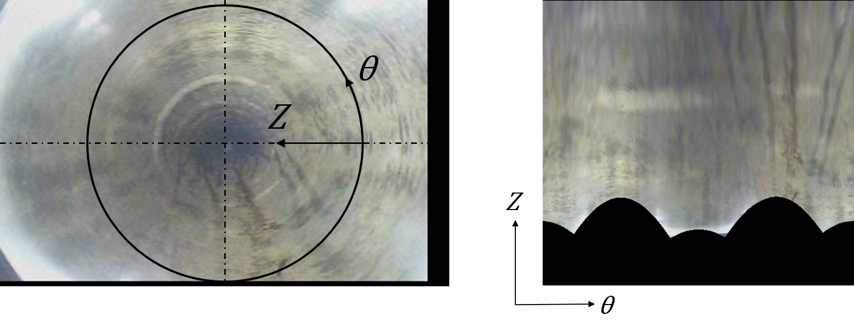
| IS1-D10 | 配管内画像からの配管3次元地図作成-オプティカルフローを用いた配管中心の決定- |
| 大山 暁, 飯田 浩貴, 池 勇勳, 梅田 和昇, 眞野 雄貴, 保井 拓巳, 中村 太郎(中央大) | |
| 概要:本論文では配管内部の画像から配管内の3次元地図を生成する方法およびオプティカルフローを用いた配管中心の決定方法を提案する.耐用年数を経過した管は漏水や道路の陥没の原因となるため,配管内部の検査が必要となる.そこで,配管内部の検査をするため,提案手法では,配管内画像を展開図に変換し,オプティカルフローを用いて運動推定を行い,展開図をつなぎ合わせることで3次元地図を生成する. | |
| キーワード:画像処理、配管検査、地図生成 | |
| |