Web 概要集 IS2
タイムテーブル
第1日目:12月6日(木)
| 時刻 | F205・F206 | ホワイエ |
| 9:10 | 開会 | |
| 9:15 | OS1 認識・基礎 | |
| 10:50 | 休 憩 | |
| 11:00 | OS2 メディア・映像 | |
| 12:35 | 昼 食 休 憩 | |
| 13:30 | IS1 インタラクティブセッション IS1-A 認識・基礎(1) IS1-B メディア・映像(1) IS1-C 産業応用(1) IS1-D ロボット・3次元・計測(1) |
|
| 15:00 | 外観検査アルゴリズムコンテスト2018 | |
| 15:20 | SS1:特別企画セッション1 | |
| 16:50 | 休 憩 | |
| 17:00 |
ST1:特別講演1 | |
| 18:30 | 懇親会(ベイブリッジカフェテリア(パシフィコ横浜 会議センター6F)) | |
第2日目:12月7日(金)
| 時刻 | F205・F206 | ホワイエ |
| 9:15 | OS3 産業応用 | |
| 10:50 | 休 憩 | |
| 11:00 | OS4 ロボット・3次元・計測 | |
| 12:35 | 昼 食 休 憩 | |
| 13:30 | IS2 インタラクティブセッション IS2-A 認識・基礎(2) IS2-B メディア・映像(2) IS2-C 産業応用(2) IS2-D ロボット・3次元・計測(2) IS2-E 外観検査アルゴリズムコン テスト2018 |
|
| 15:00 | SS2:特別企画セッション2 | |
| 16:30 | 休 憩 | |
| 16:40 | 小田原賞表彰式 | |
| 16:50 | ST2:特別講演2 | |
| 17:50 | 閉会 | |
- 時間は,変更になる場合があります
- OS□-K:基調講演(30分,質疑応答を含む)
- OS□-O△,SS-O△:オーラル講演(20分,質疑応答を含む)
- OS□-H△:ハイブリットオーラル講演(5分,質疑応答なし)
IS2 : インタラクティブセッション
| 12月7日(金) 13:30~15:00 |
| IS2-A 認識・基礎 (2) | |
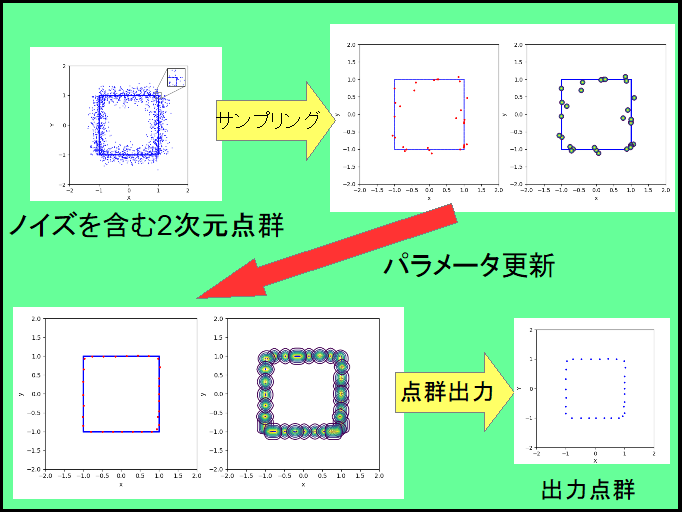
| IS2-A1 | 確率混合分布を用いた点群フィルタリングに関する検討 |
| 牛若 光太(福井大), 楊 渓(東京大), 東海 彰吾, 張 潮(福井大) | |
| 概要:計測した3次元点群のデータにはノイズや外れ値が外乱や計測器の精度不足により発生する.これらを除去しかつ元の物体の幾何学的特徴を保つために計測データに点群フィルタリングを行う必要がある.本稿では,人工的に作成した2次元点群に対してGMMを用いた既存手法と,GGMMを用いることで既存手法を改良した提案手法でそれぞれ点群フィルタリングを行い,それぞれの結果を比較・評価する. | |
| キーワード:Gaussian Mixture Model,点群フィルタリング,Generalized Gaussian Mixture Model | |
| |
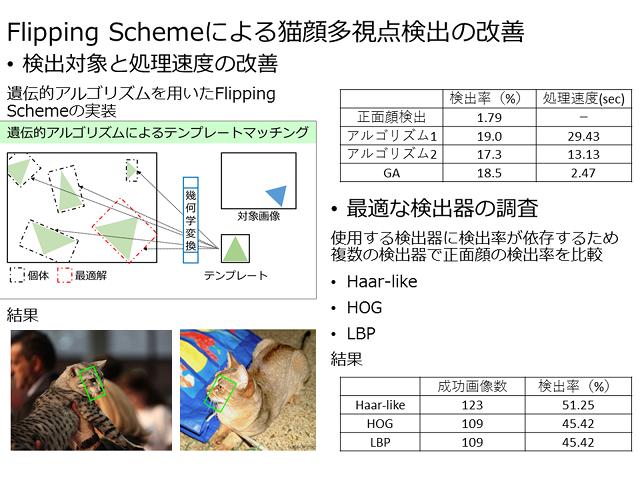
| IS2-A2 | 既存の学習結果に基づく多視点の猫顔検出 |
| 菊田 真基, 明石 卓也(岩手大) | |
| 概要:物体検出器を作成するためには大量の画像を使用して学習する必要がある上,検出できる対象物体の方向は限られてしまう.そこで正面顔検出器のみを使用し,人の顔の多視点検出を可能としたFlipping Schemeという手法が提案されている.この手法を応用し,既存の学習結果を使用して対称性を持った物体の多視点検出を可能としたい.本稿では処理速度と検出対象の改善を目的とした遺伝的アルゴリズムの利用や最適な検出器に関する調査について述べる. | |
| キーワード:多視点猫顔検出、正面猫顔検出、鏡映反転 | |
| |
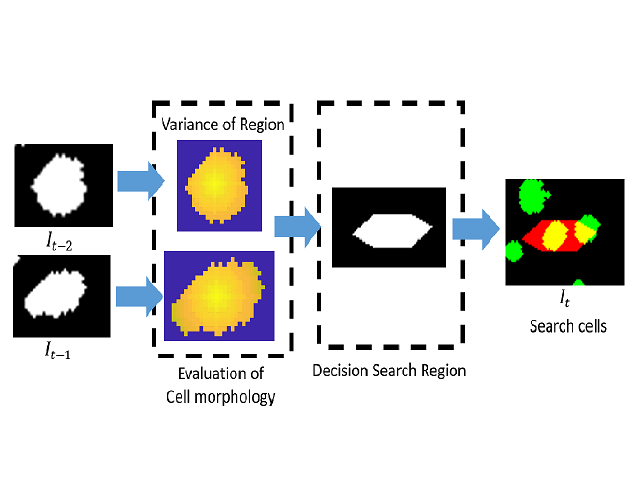
| IS2-A3 | 蛍光画像を用いた出芽酵母細胞における検出および追跡に関する検討 |
| 堀田 克哉, 沖 昌也, 荻野 裕平, 張 潮(福井大) | |
| 概要:本論文では,出芽による細胞質分裂により2個の独立な細胞が生じる出芽酵母細胞の追跡および検出に関する方法を検討する.細胞をセグメンテーションするために,局所的なしきい値による2値化処理を行うことで,局所的明暗差を軽減した細胞と背景の分離が可能である.細胞を追跡するために,追跡対象の細胞形態情報を評価することで適応的な探索領域を設定することができ無関係なラベル細胞を除くことができる.また,細胞形態情報と空間的情報による関連づけを行うことでラベルの更新と細胞質分裂を検出する. | |
| キーワード:細胞追跡、出芽酵母細胞、細胞質分裂 | |
| |
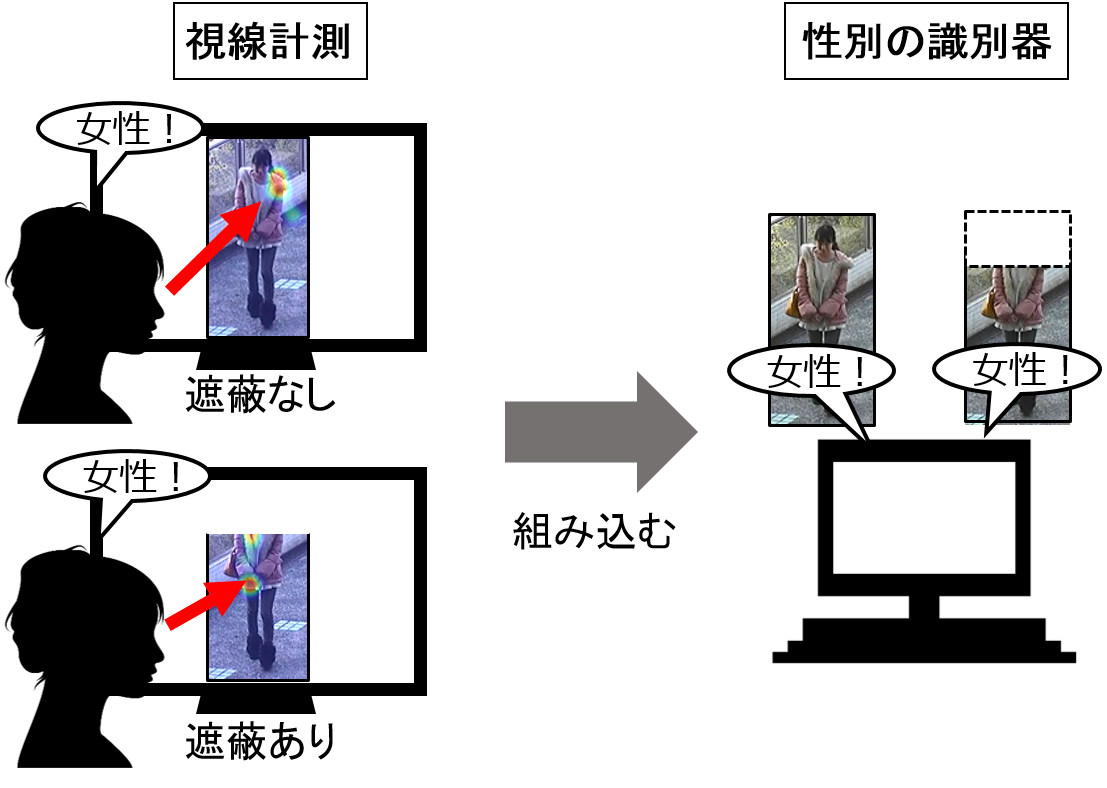
| IS2-A4 | 性別認識における身体部位の遮蔽有無による視線移動の検討 |
| 井上 路子, 白岩 史, 西山 正志, 岩井 儀雄(鳥取大) | |
| 概要:本稿では,人物画像の性別を人間が識別する際,頭部が遮蔽された状態で視線位置がどこに集まるかを検証した.また,視線位置の分布を識別器の前処理として組み込むことで,性別認識の精度が向上するかどうかを検証した.既存手法では,人間が性別を識別する際,頭部に視線が集まることを確認している.ただし,人間は頭部が遮蔽されていても性別を正しく識別することができる.その際,どこに視線が集まるかは明らかでなかった.実験により,頭部が遮蔽された場合は胴体に視線位置が集まることを確認し,その視線位置分布は性別認識の精度を改善することを確認した. | |
| キーワード:性別認識、身体、遮蔽、視線 | |
| |
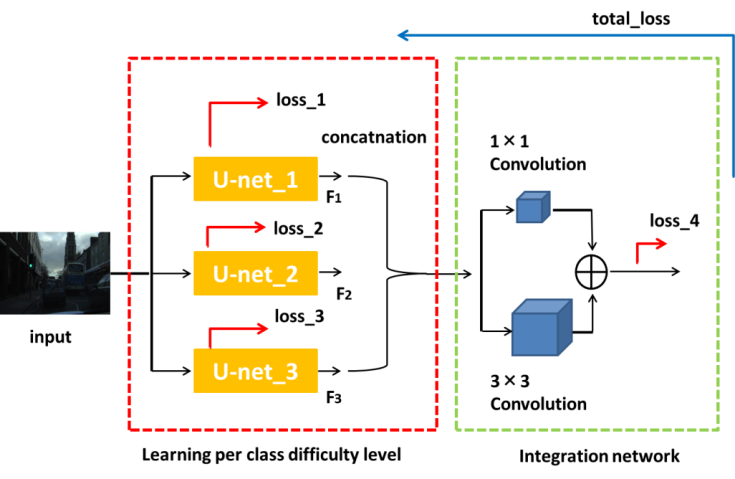
| IS2-A5 | クラス難易度別学習によるセマンティックセグメンテーション |
| 松月 大輔, 堀田 一弘(名城大) | |
| 概要:本論文ではクラス難易度別学習によるセマンティックセグメンテーションを提案する.一般に,セマンティックセグメンテーションでは1枚の画像中に複数のクラスが存在する.クラス数が増えた場合やクラス毎に出現頻度が異なる場合,セグメンテーションの精度が低下してしまう.そこで,我々はクラス毎の総ピクセル数により全クラスを難易度別に分類して習を行った後,それぞれの結果を統合する.評価実験ではCamVidデータセットを用い,従来法と提案手法との比較を行った結果,IoUで2%以上向上することを確認した. | |
| キーワード:セマンティックセグメンテーション、クラス難易度別学習、識別器の統合 | |
| |
| IS2-B メディア・映像(2) | |
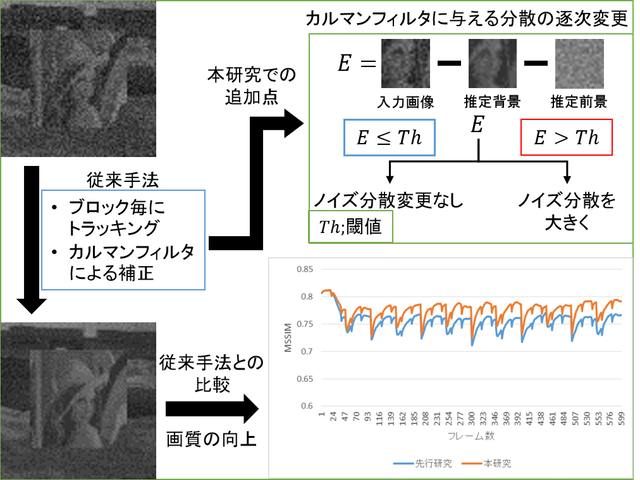
| IS2-B1 | 逐次分散変更を利用したカルマンフィルタによる水中映像の画質改善 |
| 江頭 誠, 右田 雅裕(熊本大), 榎本 洸一郎(滋賀県立大), 小室 孝(埼玉大), 戸田 真志(熊本大), 桒原 康裕(道総研), 手塚 尚明(水産研究・教育機構) |
|
| 概要:水中をカメラで撮影した際に移り込んだ砂や藻,気泡などの視野妨害ノイズを除去するため,カルマンフィルタとトラッキングを用いて入力された水中動画像を,ゆっくり変化している背景と,ある程度の速度で移動する前景に分離する.本研究ではトラッキングの精度によってカルマンフィルタに与えるノイズ分散を変更することで除去精度が向上することを確認した.今後はさらなる画質向上のため,パラメータの最適化等を行う必要がある. | |
| キーワード:カルマンフィルタ、視野妨害ノイズ、水中動画像 | |
| |
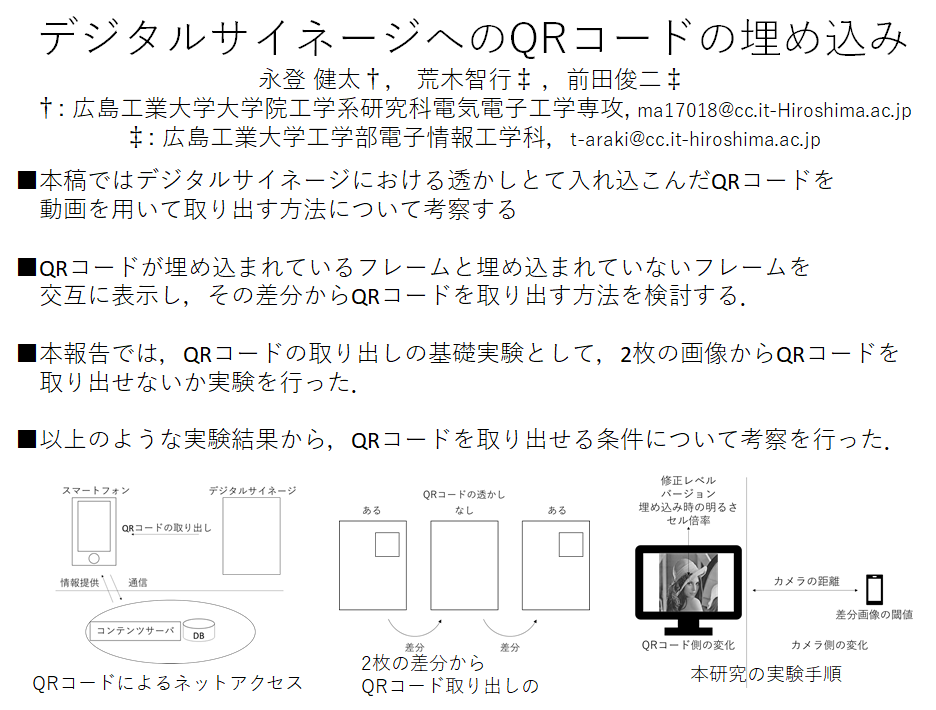
| IS2-B2 | デジタルサイネージへのQRコードの埋め込み |
| 永登 健太, 荒木 智行, 前田 俊二(広島工大) | |
| 概要:デジタルサイネージの画像にQRコードを透かしとして埋込み,広告に関心の無い人には通常のデジタルサイネージに見え,広告に関心のある人にはデジタルサイネージにアプリを立ち上げたスマートフォンを向けることにより,透かしとして入っているQRコード内のURLを読み取ることが可能となるシステムを開発している.このシステムでは,スマートフォンを持つユーザはデジタルサイネージからインターネット経由で付加情報を得ることができる.本稿ではQRコードを埋め込む際の各種パラメータと読み取り性能について実験的に検証を行なった結果を報告する. | |
| キーワード:デジタルサイネージ QRコード | |
| |
| IS2-B3 | 幼児向け電子書籍の普及に関する考察 |
| 手束 柾俊, 瀬田 陽平, 植木 一也, 桑原 明栄子(明星大) | |
| 概要:近年,電子書籍の普及率はジャンルや年齢層により偏りがある.情報のデジタル化が進み,電子書籍の利便性と有用性に関しての認知度が大幅に高まった.しかし,紙媒体のデータのデジタル化であることが多く,無料のコンテンツが多い漫画以外の普及率は低い.本論文では、「幼児向け絵本」に着目し,利用率の低い原因の調査と提案を行う.また,調査結果から電子書籍の提案を行う.年齢層や習熟度に応じたユーザーインターフェイスを作成し,読み手に応じた切り替え機能を提供することが有効だと考える.最後に,絵本が電子化されることの有効性を考察する.そのことにより,幼児向けの電子書籍の普及の一助となる. | |
| キーワード:幼児向け、電子書籍、デジタル絵本 | |
| |
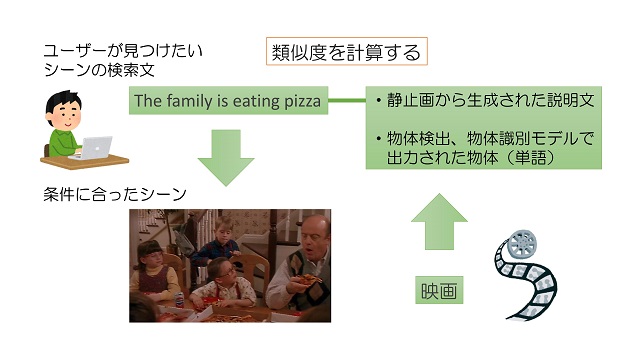
| IS2-B4 | Deep learningを用いた映画やドラマにおけるシーン検索 |
| 飯野 雄哉, 桑原 明栄子, 植木 一也(明星大) | |
| 概要:シーン検索を行うにあたり様々な手法が考えられるが,本稿では学習済みのDeep learningのモデルを用いた映画のシーン検索を提案する.動画を1秒あたり1枚の静止画として切り出した後,静止画から説明文生成や物体検出といった学習済みの複数のモデルを使用し,生成した説明文や検出した物体から条件となるシーンを入力することによって検索を行った.word2vecを用いて検索クエリ文との類似度を計算し,高い順にランキングを出力することにより,認識モデルの有効性を評価した. | |
| キーワード:シーン検索、Deep learning、word2vec | |
| |
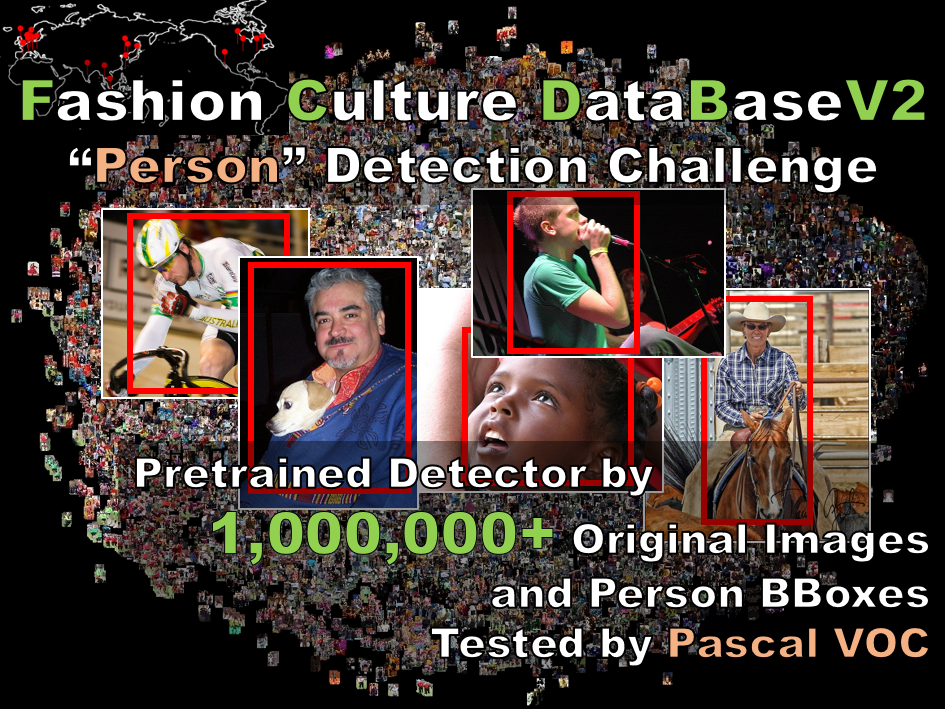
| IS2-B5 | 大規模ファッションデータベースによる人物検出 |
| 美濃口 宗尊, 鈴木 智之, 岡山 健(産総研), 中村 明生(東京電機大), 佐藤 雄隆, 片岡 裕雄(産総研) | |
| 概要:本論文では人物検出タスクにおいて,大規模ファッションデータベースであるFashion Culture Database v2(FCDBv2)の有用性を調査する.FCDBv2は世界最大規模のファッションデータベースであり,世界各地で撮影された,多種多様な人物画像で構成されている.2018年現在,高精度かつ高速処理が可能な人物検出手法にて,FCDBv2を学習することにより人物検出の精度向上を図る.実験ではベースラインモデルと比較して,同等または上回る精度を得ることができ,FCDBv2の有用性を示唆した. | |
| キーワード:人物検出、大規模データベース、ファッション | |
| |
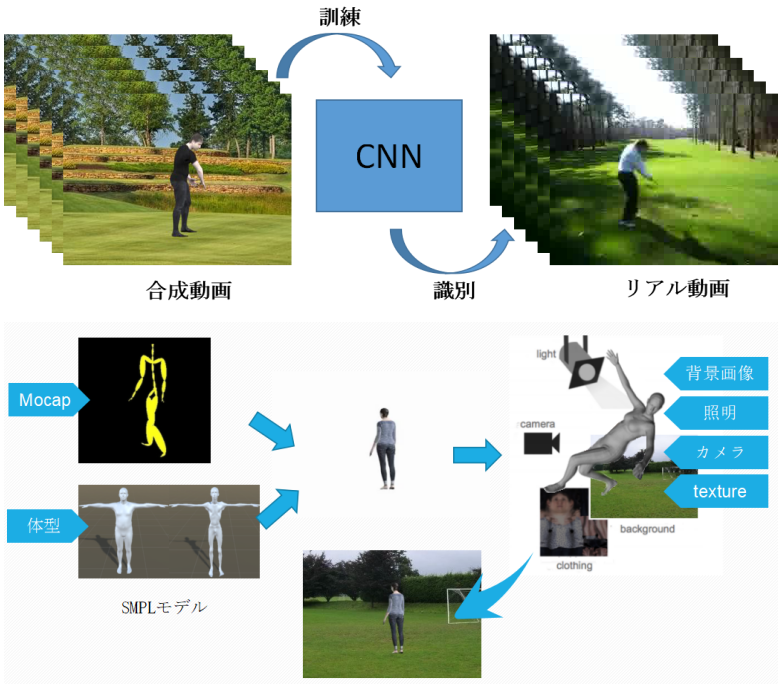
| IS2-B6 | 人物行動認識用動画像訓練データセットのCGに基づく自動生成 |
| 張 雨辰, 片岡 裕雄, 佐藤 雄隆(産総研) | |
| 概要:近年,画像認識の精度が急速に向上しており,静止画像の認識では,既に人間を超える認識性能が報告されている例もある.一方で,動画像の認識技術は未だ発展途上の段階にあり,これからの研究分野として注目が集まっている.人物行動を学習するためには大量の動画像が必要となるが,アノテーションのコストが高く,ボトルネックとなっている.この問題を解決するため,本研究ではCGにより合成動画像データを自動で生成し,大量の学習用データを生成したうえで,実画像との性能の差異の分析を行った. | |
| キーワード:動画像,行動認識,データ生成 | |
| |
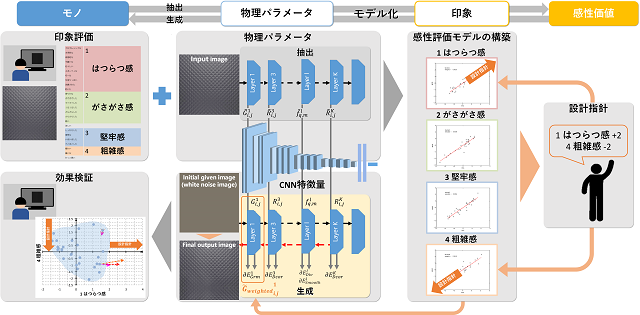
| IS2-B7 | CNNのスタイル特徴を用いた感性的質感を制御可能なテクスチャ生成手法 |
| 竹本 敦, 飛谷 謙介, 谿 雄祐, 藤原 大志, 山﨑 陽一, 長田 典子(関西学院大) | |
| 概要:本研究では,所望の視覚的質感を有するテクスチャ生成手法を提案した.まず,多様なテクスチャ画像を対象に,主観評価実験により視覚的質感の定量化を行った.さらに,畳み込みニューラルネットワークを用いてテクスチャ画像の特徴量を抽出し,定量化された視覚的質感との関係性をモデル化した.その後,得られたモデルに基づき,所望の視覚的質感を有するよう特徴量の更新および画像生成を行うことで手法を実現した.その後,効果検証実験により手法の有効性を確認した. | |
| キーワード:テクスチャ生成、視覚的質感、Deep correlation feature、スタイル特徴 | |
| |
| IS2-B8 | 再帰型ニューラルネットワークを用いた動き特徴量による単語読唇システムの開発 |
| 齊藤 剛史, 窪川 美智子(九工大) | |
| 概要:本稿では,再帰型ニューラルネットワークを用いた動き特徴量による読唇手法を実装したWebベースで利用可能な実用性のある単語読唇システムを開発する.日本語25単語を認識対象として,発話者48名から収集した発話シーンを用いて学習した.5,000サンプルのオフライン認識実験およびクローズドベータテストにおける約700回の試行実験を行った結果,両実験における認識精度はそれぞれ74.4%,72.0%を得て,開発システムの有用性を確認した. | |
| キーワード:単語読唇、深層学習、システム開発 | |
| |


| IS2-C 産業応用(2) | |
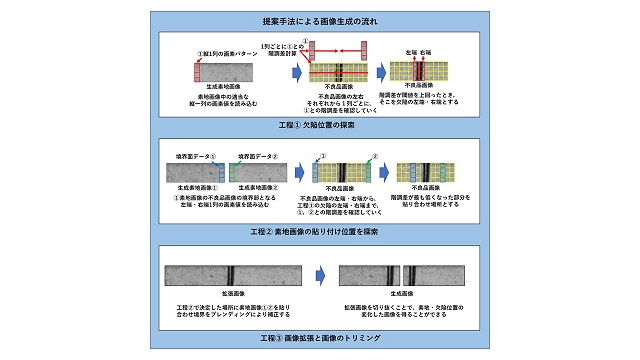
| IS2-C1 | 時計部品の外観検査自動化のためのデータ拡張手法の検討 |
| (OS3-H1) | 松岡 海登, 大野 光津弘, 青木 公也(中京大), 輿水 大和(YYCソリューション), 伊藤 麻里(セイコーインスツル) |
| 概要:外観検査の自動化で機械学習を用いる際,大量のサンプル画像によって精度を向上させることが非常に重要となる.本研究では,特定の時計部品を対象ワークとし,不良品画像の欠陥周囲に対して画像拡張を行い,元の不良品画像と違う位置で画像を切り抜くことで,欠陥位置の変化した新たな画像を得る手法を提案する.また,機械学習の精度をより効果的に向上させるには質の良い画像を生成する必要があるとし,提案手法ではこの点に関しても考慮した. | |
| キーワード:データ拡張,テクスチャ合成,外観検査,深層学習 | |
| |
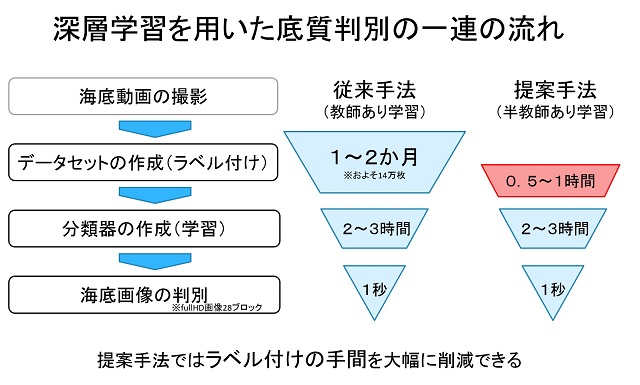
| IS2-C2 | 半教師あり学習を用いた海底画像からの底質判別手法 |
| 北川 純(新潟大), 榎本 洸一郎(滋賀県立大), 戸田 真志(熊本大), 三好 晃治, 桒原 康裕(道総研) | |
| 概要:北海道オホーツク海のホタテガイ漁業では,漁場環境を把握するために年間100km以上の海底画像を撮影している.我々は,深層学習を用いた海底底質判別手法を提案しているが,大量の画像データにラベルを付けるのは膨大な時間と労力を要する.そのため,より少ない画像のラベル付けで,学習画像すべてにラベル付けを行う教師あり学習(Supervised Learning)と同等の判別精度が達成できる学習手法が必要となる. 本稿では,データセット作成の簡易化を目的とし,半教師あり学習(Semi-Supervised Learning)を用いた底質判別手法を提案する. | |
| キーワード:畳み込みニューラルネットワーク、半教師あり学習、資源量調査 | |
| |
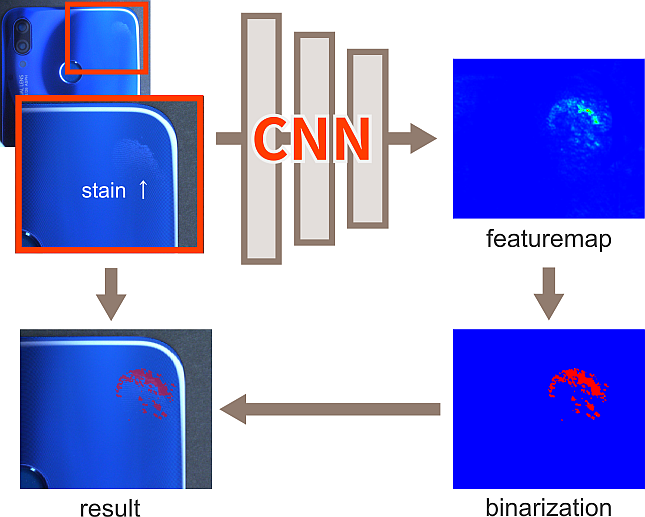
| IS2-C3 | AI技術による外観検査の自動化 |
| (OS3-H2) | 池田 泰之, 半澤 雄希, 栗田 真嗣(オムロン) |
| 概要:本稿では外観検査の自動化において、多様な欠陥を検出する技術を提案する。現在、目視検査の自動化ニーズが高まっているが、既存の画像センサでは実現できていない。そこで我々はDeep Learning技術を活用し、多様な欠陥状態を事前に学習することで、複雑な設定なく誰でも簡単に検査可能な欠陥検出技術を構築した。また、高速動作可能な工夫を導入し、既存の画像センサに搭載可能にした。 | |
| キーワード:外観検査、AI技術、画像処理 | |
| |
| IS2-C4 | 車載画像処理装置などのネットワーク認証方式 |
| 兼見 柊哉, 荒木 智行, 前田 俊二(広島工大) | |
| 概要:本稿では車の安全な走行を担う車載画像処理装置を結ぶネットワークにおけるメッセージ認証方式について提案を行う. | |
| キーワード:車載画像装置、CAN、車載ネットワーク、セキュリティ、量子コンピュータ | |
| |
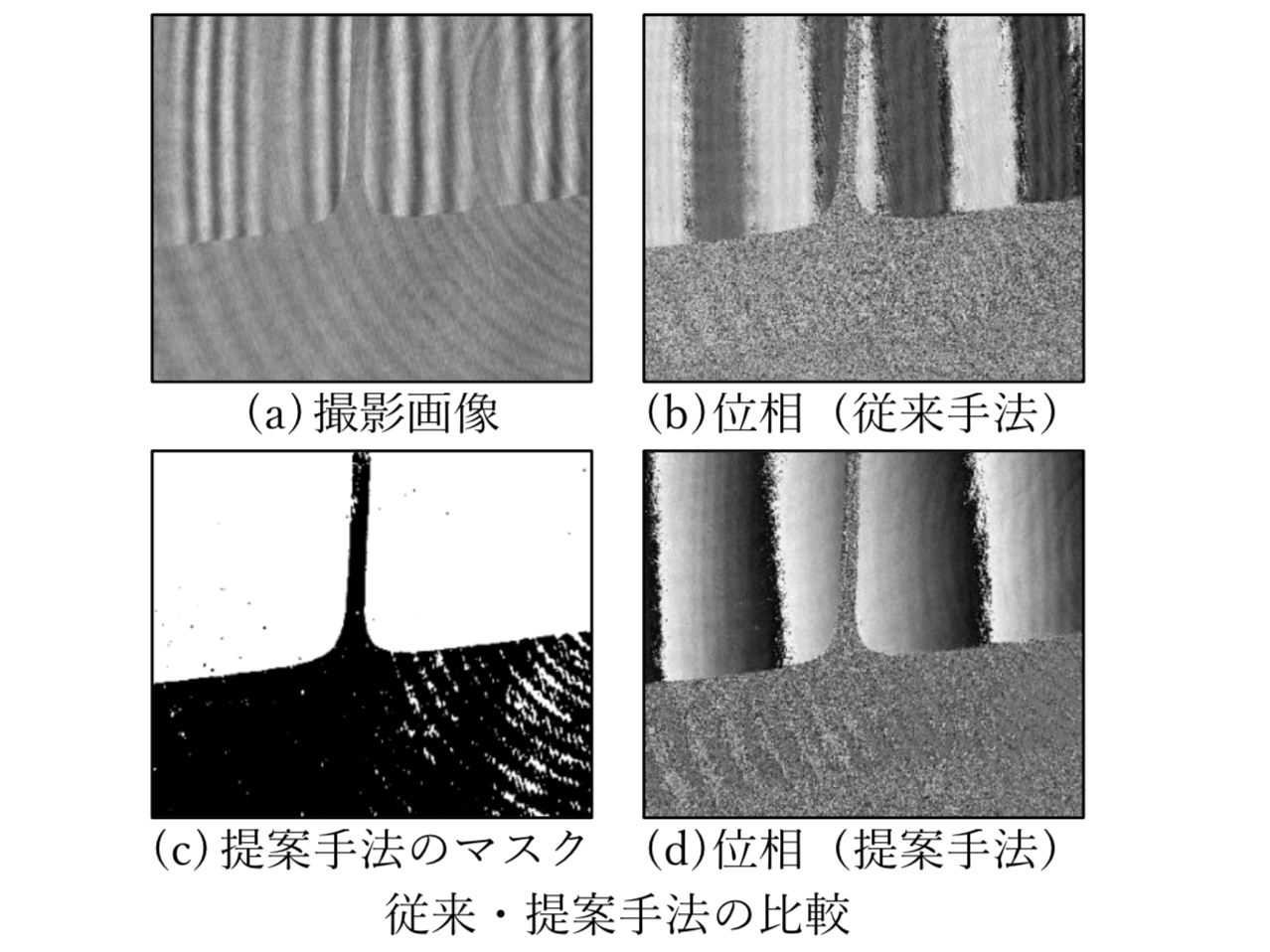
| IS2-C5 | 独立成分分析を用いた二波長位相シフト干渉計におけるロバスト計測 |
| (OS3-H3) | 鷲見 典克(名工大), 服部 公央亮(中部大), 田口 亮(名工大), 保黒 政大(中部大), 梅崎 太造(名工大, 東京大) |
| 概要:近年,鏡面や透過物体を精密に計測する技術として,位相シフト干渉計なと゛の計測器か゛普及しており,参照位相か゛未知の環境においても計測可能な手法か゛いくつか提案されている.この中て゛,二波長の位相シフト干渉計においても,独立成分分析を用いて計測可能な手法か゛提案された.しかし,この手法て゛は干渉しない領域を含む計測対象て゛は,計測に失敗する.そこて゛本研究て゛は,このように干渉しない領域を含む計測物体に対してもロハ゛ストに計測可能な手法を提案する. | |
| キーワード:位相シフト法,干渉計,独立成分分析 | |
| |
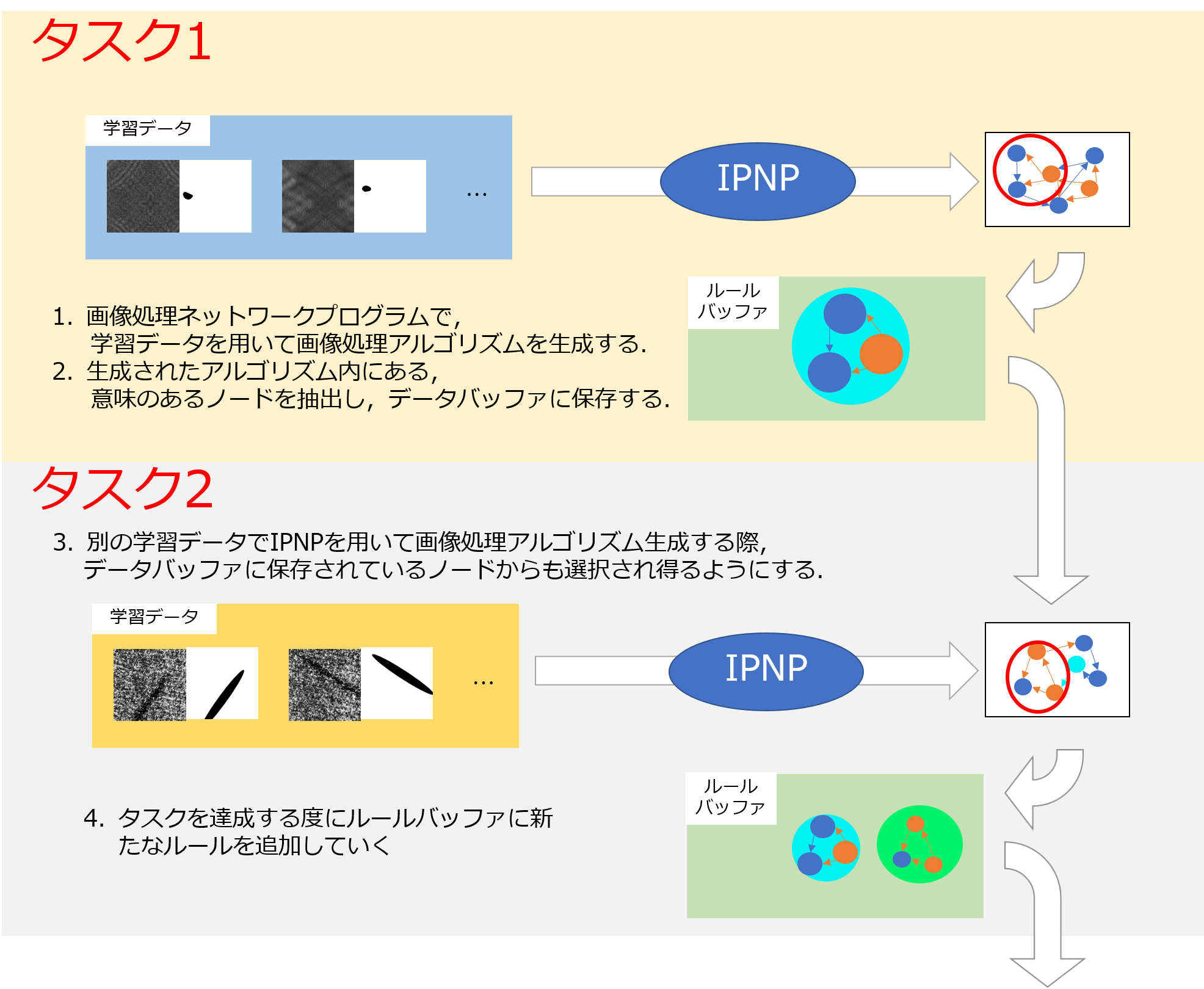
| IS2-C6 | 検査画像処理プログラムの自動生成における処理の抽象化の検討 |
| 坂井 舜, 伊藤 純, 青木 公也(中京大) | |
| 概要:近年AI技術の急速な発展から,外観検査自動化においてもその活用が進められている. AI技術を用いた手法として,進化的アルゴリズムを画像処理に応用した画像処理ネットワークプログラムや,画像処理ネットワークプログラムに人の実装プロセスを導入した手法がある.これらの研究では一連の画像処理の手順を段階的に抽象度を変化させてとらえることで,より汎用的な画像処理アルゴリズム生成を可能とする.しかし,手順の抽象化は予め設計されているため,拡張・改善の余地が存在する.そこで本研究では,人の実装プロセスにおける既知の概念から新しいルールを抽出し,再利用する動的な抽象化の導入検討を行う.本研究ではConvolutional Neural Networkと画像処理ネットワークプログラムとの比較を行い,基本アイデアの実現可能性を見出した. | |
| キーワード:プログラム自動生成,GNP,抽象化,進化的機械学習 | |
| |
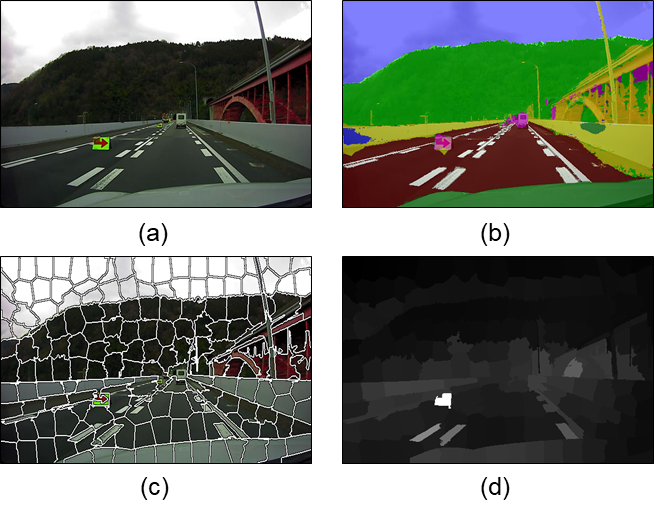
| IS2-C7 | 条件付き視覚的顕著度による路上障害物検出手法 |
| (OS3-H4) | 山中 正雄(トヨタIT開発センター), 藤澤 逸平(アラヤ), 加畑 俊之介(イースクリエイト) |
| 概要:本稿では,車載カメラで取得した画像中の路上障害物を検出する手法に関して報告する.提案法は,入力画像(a)を複数の意味的ラベルに分割する(b).また,入力画像を複数の局所領域に分割する(c).さらに,局所領域毎に得られた意味的ラベルに対する確率分布に基づいて,“路上障害物らしさ”を算出する(d).最終的に,得られた路上障害物らしさに対して,適切な閾値を設定することにより,画像中の路上障害物を検出する.特に,提案法では,“条件付きの視覚的顕著度”という新たな特徴量を導入する.評価実験では,その有効性を定量的に確認した. | |
| キーワード:路上障害物検出,車載カメラ画像,深層学習,条件付き視覚的顕著度 | |
| |
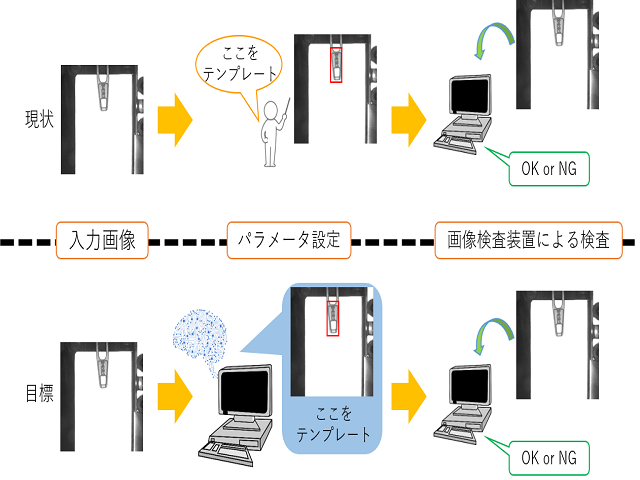
| IS2-C8 | Deep Learningを用いた画像検査システムのパラメータ設定の検討 |
| 長田 基, 青木 公也(中京大), 片山 隼多, 山本 泰弘, 池野 純, 加藤 久幸, 福澤 満保(YKK) | |
| 概要:外観検査は,画像検査装置による自動化が図られてきた.しかしながら,一般的に画像検査装置で実装されている画像処理は,結局のところ,人手によって設定しなければならないパラメータが存在する.従って,検査対象の違いや検査員の違い等によって,調整されるパラメータにバラつきが生じる可能性がある.このことは,画像検査装置の運用時の性能に影響する.一方,近年,Deep LearningなどのAI技術を駆使して外観検査を自動化することが期待され,目視検査を全てAIに置き換える事例も増えている.しかし,検査工程をAIに任せた場合,判定理由の解釈や説明責任を果たすことが困難である.そこで本研究は,目視検査を直接的にAIに置き換えるのではなく,既存の画像検査システムのパラメータ設定をAIに委ねる手法を提案する.本研究では,検査対象が変わるたび,その都度,テンプレートの設定が必要なテンプレートマッチングによる検査を例に取り上げる.実験では,AIによって設定されたテンプレートは,検査員が設定したテンプレートと同等レベルの自動検査が可能であることを確認した. | |
| キーワード:外観検査,パラメータ設定,Deep Learning,テンプレートマッチング | |
| |
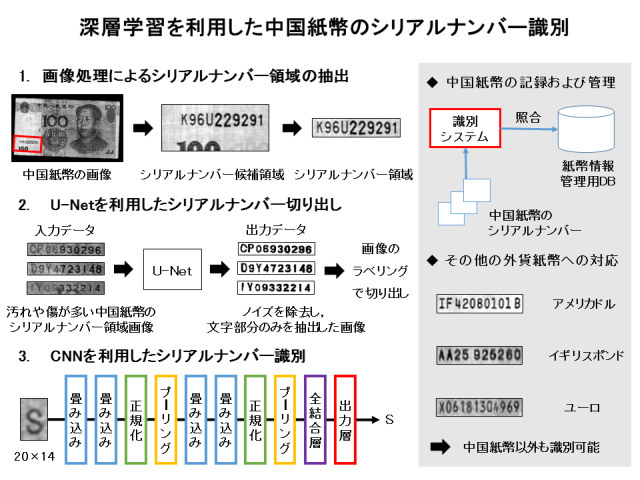
| IS2-C9 | 深層学習を利用した中国紙幣のシリアルナンバー識別 |
| 中浦 大貴, 木下 浩二(愛媛大), 中浦 一浩, 井村 孝(システムエルエスアイ) | |
| 概要:中国国内の偽札対策を目的として,紙幣を適切に管理するために,記載されているシリアルナンバーを正確に記録することが重要となる.そこで我々は,画像処理でシリアルナンバー領域を抽出し,深層学習で作成したU-Netで文字の切り出しを行い,CNNで識別器を作成することで,中国紙幣の画像からシリアルナンバーを自動で識別する手法を提案した.また,本手法がアメリカドルやイギリスポンド,ユーロなどの外貨紙幣に対しても,有効であることを確認した. | |
| キーワード:深層学習、画像処理、CNN、U-Net、文字切り出し、シリアルナンバー識別 | |
| |
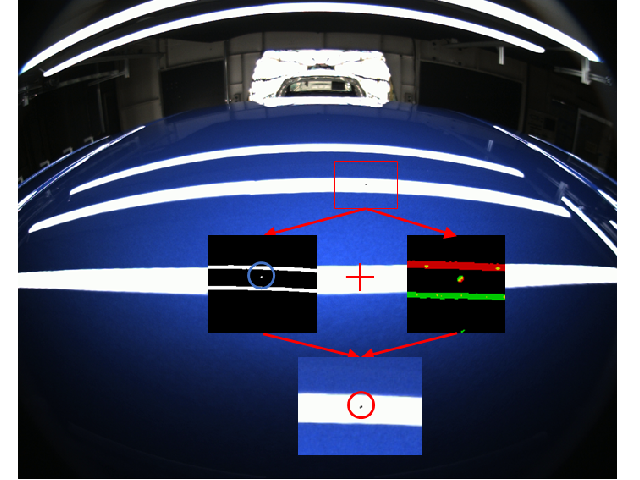
| IS2-C10 | 明暗勾配照明を用いた自動車のルーフにおける欠陥検出に関する検討 |
| 張 精, 菊田 真基(岩手大), 張 潮(福井大), 明石 卓也(岩手大), 松井 洋一, 伊藤 昭芳, 安味 憲一(トヨタ自動車東日本) |
|
| 概要:自動車の塗装工程における検査は,人の目視により塗装表面を行っている場合が多い.その問題点として,熟練度や疲労などの要因によって結果が不安定になり,不具合品を顧客まで流出させている.本研究の目的は蛍光灯と安価なUSBカメラのみを使用し,明暗勾配照明を用いて,外観検査を自働化し,自動車のルーフ塗面のブツ不具合を検出することである. | |
| キーワード:塗装検査、光照射法、明暗勾配照明 | |
| |
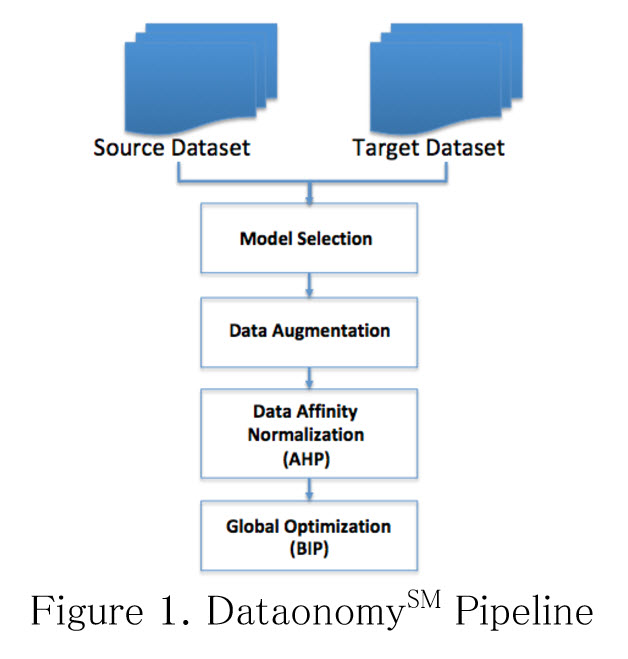
| IS2-C11 | Visual Defect Detection Across Industry |
| Xu Wanxin, Zhu Yu(DBC global foundation), Sun Kuanyan(Illions Instutute of Technology), Wang Dongyan, 願 海松(DBC global foundation) |
|
| 概要:深層学習ベースの手法は、製品の欠陥を分類し検出する有望な結果を示している。 しかし、欠陥検査の最大の課題の1つは、欠陥サンプルの欠如である。 本論文では、大規模な公開データセット(ImageNetなど)と限られた欠陥データセットとの間の本質的関連性を抽出し、大量サンプルのメタ欠陥データセットを作成するためのDataonomy(Data + Taxonomy)と呼ばれる手法を提案する。メタ欠陥データセットが与えられた場合、我々はさらに、深層学習(DL)ベースの視覚欠陥検査アプローチを提案した。実験結果は、提案された方法の能力と効率を示しており、鉄鋼、木材、家電などの産業に適用することができる。 | |
| キーワード:視覚欠陥検査、 深層学習、データノノミー | |
| |
| IS2-D ロボット・3 次元・計測(2) | |
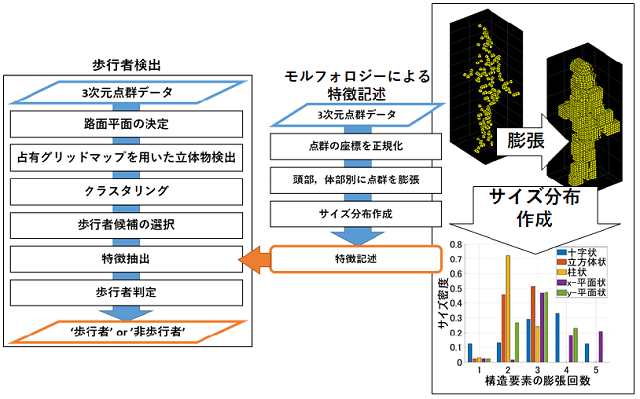
| IS2-D1 | モルフォロジーを用いた歩行者3次元点群の特徴記述 |
| (OS4-H1) | 丸山 健太(九工大), 藤尾 光彦(近畿大), 榎田 修一(九工大) |
| 概要:近年,自動運転に関する技術開発が急激に発展しているが,歩行者の多い一般道路において安全かつ円滑に走行するため,歩行者を正確に認識してやり取りをすることが重要である.本研究では認識を行うためのセンサとしてLIDARを利用する.LIDARにより取得した3次元点群に対して,3次元拡張したモルフォロジー演算を用いてサイズ分布を作成し,特徴記述を行う新たな手法を提案する. 本論文では提案手法の距離別の認識精度を求め,他の手法と比較して有効性を確認した. | |
| キーワード:LIDAR、Mathematical Morphology、歩行者検出 | |
| |
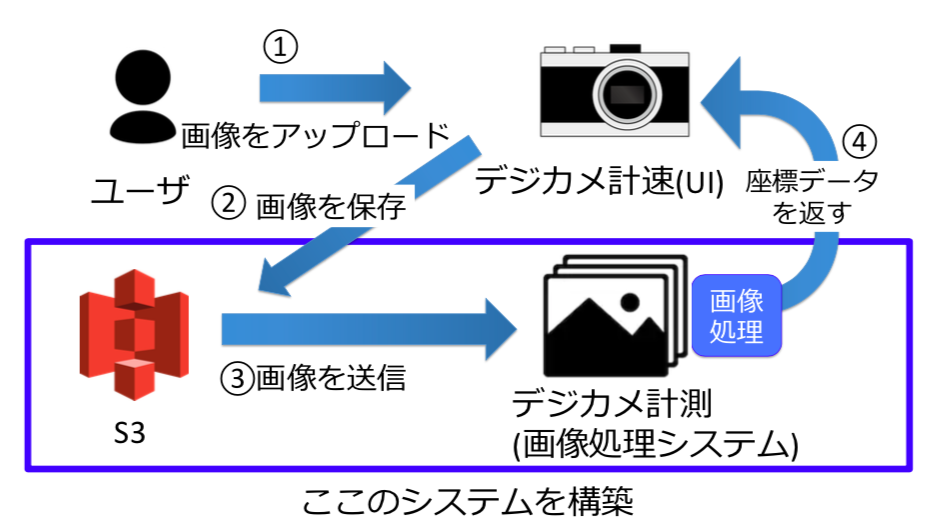
| IS2-D2 | 複数画像間マッチングによる土木施工図面作成に関する研究 |
| 立野 圭一, 田中 和明(九工大) | |
| 概要:九州工業大学の既存の制作物としてデジカメ計速という3次元測量技術があるが,これは測りたい建設物を別角度から撮った2枚の写真の中で測りたい部分をそれぞれ手動で選択する仕組みだった.そこで土木で活用するには、測りたい部分が砂や石などであるため、三次元測量の自動化の研究を行った.Opencvライブラリの特徴点抽出,特徴量計算を用いて別角度から撮った二枚の画像のそれぞれの特徴点の対応点探索を行う. | |
| キーワード:三次元測量、土木現場、画像マッチング | |
| |
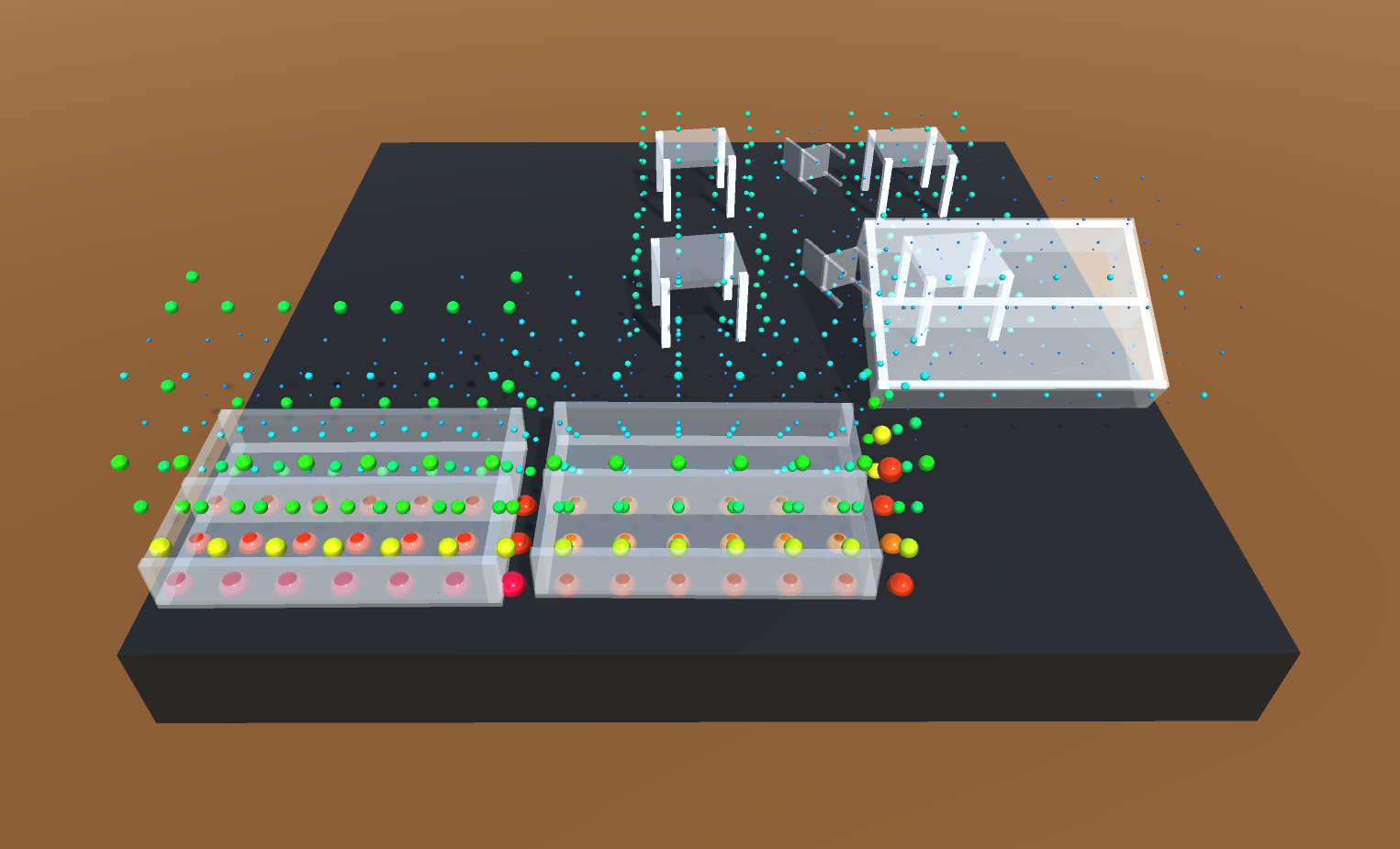
| IS2-D3 | 物理演算に基づく屋内空間地震三次元ハザードマップの生成 |
| (OS4-H2) | 飯樋 遼輝(筑波大, 産総研), 鈴木 亮太(産総研), QIU YUE, 佐藤 雄隆(筑波大, 産総研) |
| 概要:任意の部屋の地震の被害を物理シミュレーションにより解析し,ハザードマップによる可視化やVR空間による体験によってユーザにより直感的に理解させるシステムについて述べる.このシステムにより,地震による被害がどのように生じるのかを任意の部屋に対して容易に把握することが可能になり,ユーザが一般論だけでなく物理的な基準に基づき,実際の自分の部屋における危険な箇所性を把握し未然に対策を講じられるようにすることを目指す.本論文ではシステムの詳細と、それを用いた定性的評価について述べる. | |
| キーワード:物理シミュレーション,ハザードマップ,VR | |
| |
| IS2-D4 | 自立走行型ロボットにおける「おもてなし」に関する研究 |
| 長田 佳己, 相原 佳輔, 赤塚 総志(明星大), 山口 仁一(山口ロボット研究所), 植木 一也, 桑原 明栄子(明星大) | |
| 概要:近年,「変なホテル」などの登場により,ロボットを利用する「おもてなし」の需要は高まっている.しかし,日野おもてなしロボット「ピノックルR」の既存の機能では,「おもてなし」を行うことが困難である.よって,日野おもてなしロボット「ピノックルR」の既存の機能を用いての「おもてなし」の有効利用方法について検討をする.最後に,日野おもてなしロボット「ピノックルR」が自律的な移動・身体動作を伴う「おもてなし」を行うために,自律移動時の安全性能の向上と移動・身体動作を伴うインタラクション機能の追加を提案することにより,おもてなしロボットとしての有効な利用の一助とする. | |
| キーワード:ロボット,インタラクション,おもてなし,日野市 | |
| |
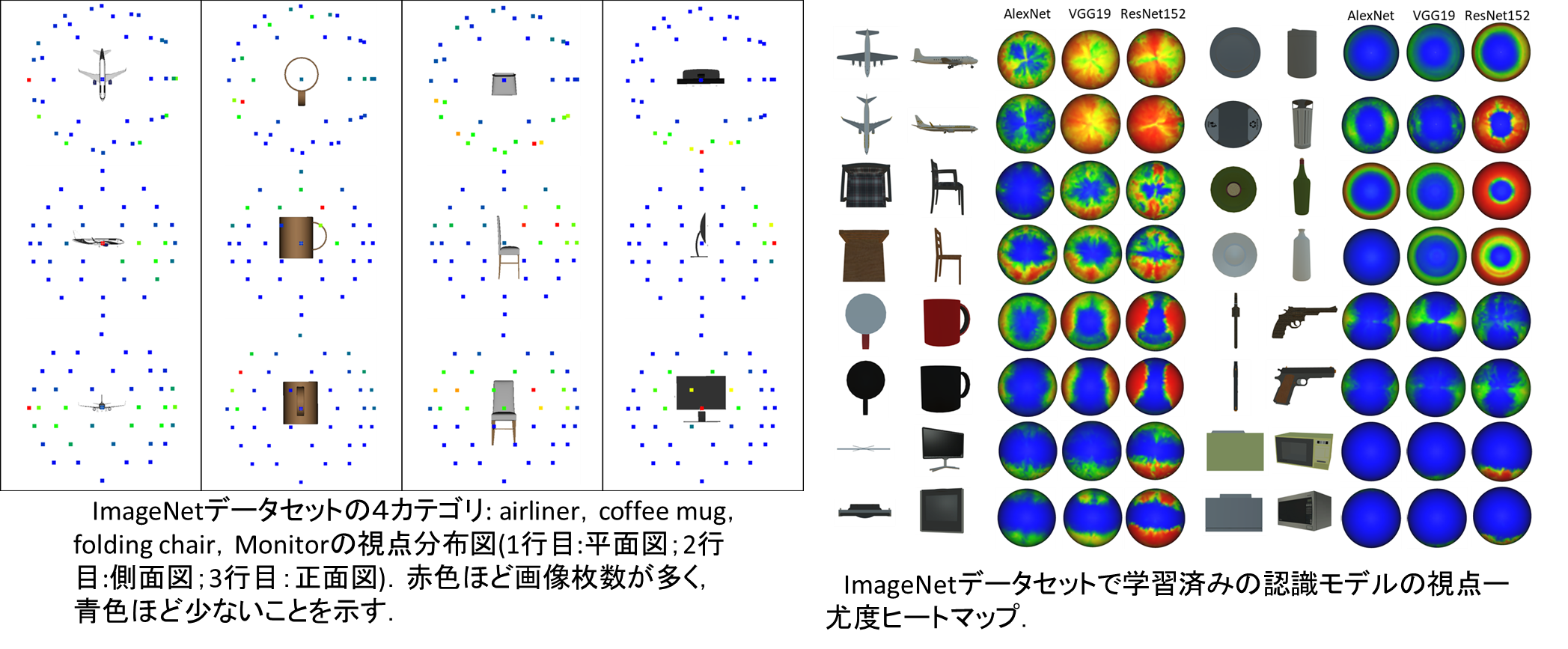
| IS2-D5 | 一般物体認識用大規模画像データセットにおける視点依存性に関する考察および定量化 |
| (OS4-H3) | QIU YUE, 佐藤 雄隆, 鈴木 亮太, 片岡 裕雄(産総研) |
| 概要:実環境で任意のアングルから撮影した画像の認識を行う場合,良好な認識結果を得ることが思いのほか困難であることがある.すなわち、ある物体を認識するにあたって物体を観測する視点(物体を見る方向)に得手不得手が少なからず存在する。これは,人間が撮影を行う際には,対象の形状特徴を最もよく表す視点を必然的に選択するので,そのような画像を収集することで作成された既存の物体認識のための学習用画像データセットに強い視点のバイアスが存在することが原因であると予想される。これまで視点によって認識率が異なることは経験的に知られていたが、定量的に分析した例は無かった。そこで本研究では、本研究では,既存の一般物体認識用大規模画像データセットに視点のバイアスが存在することを明らかにし、且つそれを定量化・可視化することを目指す. | |
| キーワード: 深層学習,物体認識,視点依存性,ヒートマップ | |
| |
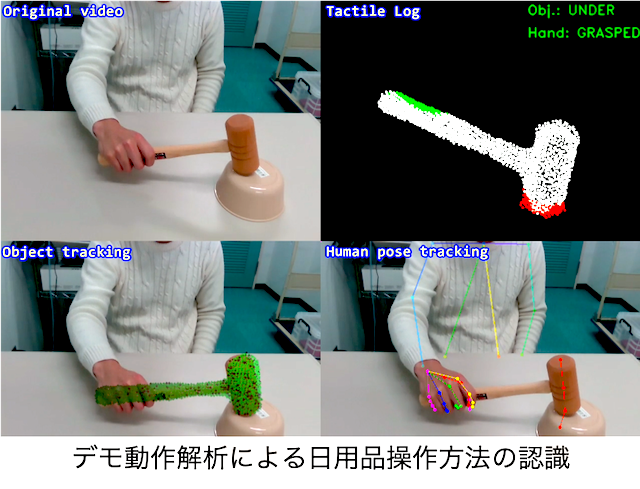
| IS2-D6 | 日用品操作方法の理解のためのデモンストレーション動作の記述手法の提案 |
| 秋月 秀一, 青木 義満(慶應大) | |
| 概要:人間のデモンストレーションを解析することによって,道具の使用履歴を時系列的に記録する手法を提案する.提案手法では日用品の3Dモデルの表面に使用履歴を記述したTactile logと呼ぶ独自のデータを生成する.日用品の6DoF姿勢を時系列に追跡しながら,1.3Dモデルに対して接触する対象(人または物体),2.接触位置,3.接触方向の3つのデータを記述する.さらに,人間による道具取り扱い方法を解析するための新たなデータセット(OCI-Dataset)を提案する. | |
| キーワード:Human-object interaction (HOI) 、点群処理、3次元位置姿勢推定 | |
| |
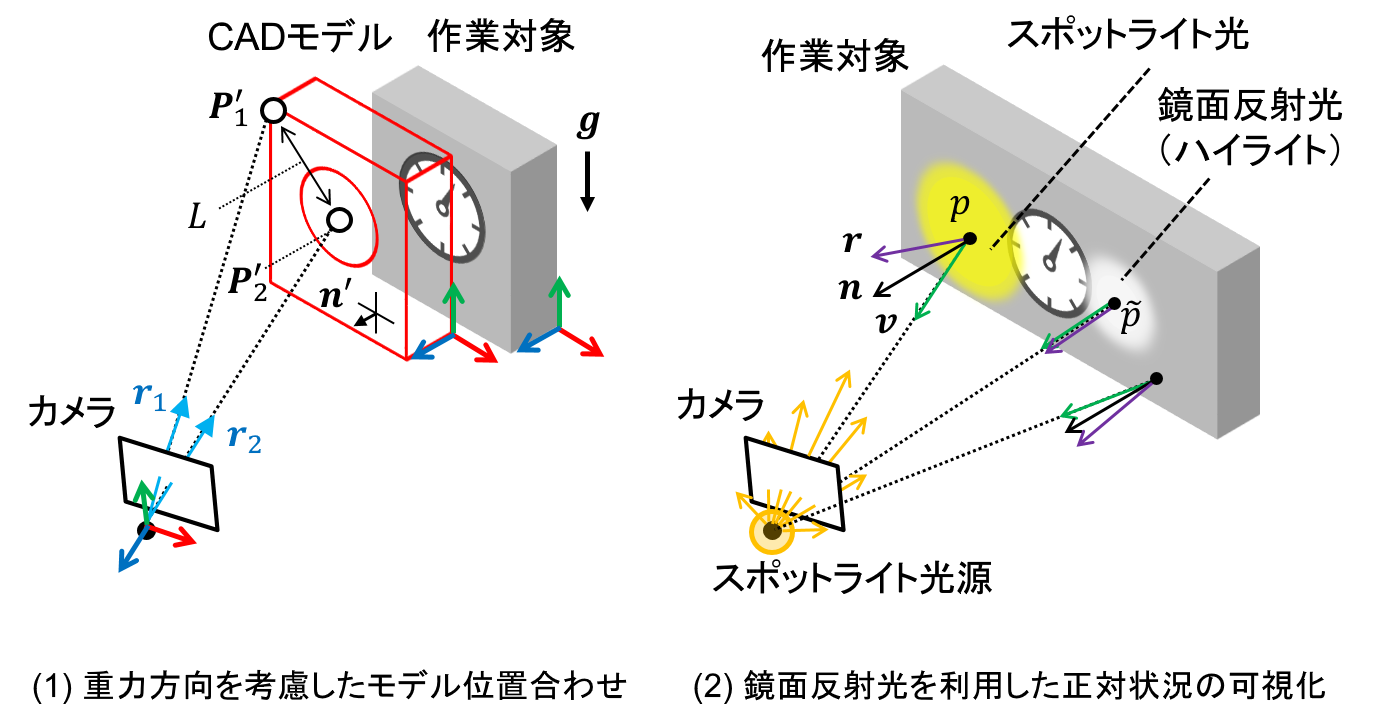
| IS2-D7 | 直感的な視覚フィードバックを与える作業支援ARインタフェース |
| (OS4-H4) | 山尾 創輔, 山田 萌(富士通研), 川竹 翔大(富士通), 姜 山(富士通研), 小松 竜太, 原 英樹(富士通) |
| 概要:画像解析に基づく現場作業支援 AR のための,直感的な視覚フィードバックを与える作業支援ARインタフェースを提案する.提案手法は,実環境の重力方向および仮想的な鏡面反射光を利用することで,モデル位置合わせおよび正対撮影の正確かつ容易な実施を可能にする.提案手法の適用例として,サーバラックの棚卸作業支援 AR システムを構築する.性能評価実験を通し,経験の浅い現場作業者に対して提案手法が有効に機能することを定量的に示す. | |
| キーワード:現場作業支援,AR 技術, モデル位置合わせ,正対状況の可視化 | |
| |
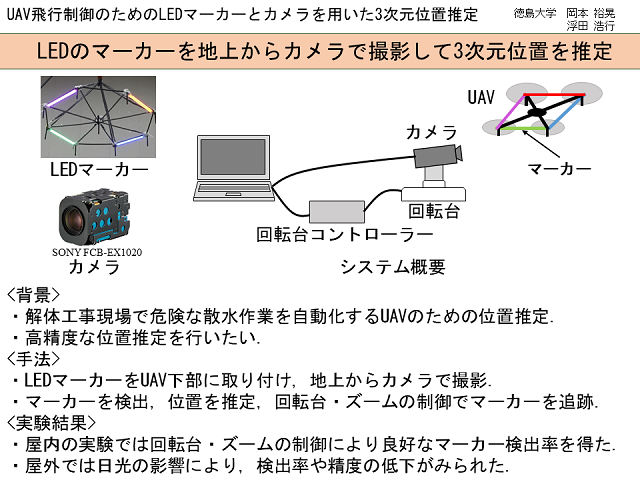
| IS2-D8 | UAV飛行制御のためのLEDマーカーとカメラを用いた3次元位置推定 |
| 岡本 裕晃, 浮田 浩行(徳島大) | |
| 概要:本論文ではUAVの自動飛行制御のために,LEDマーカーとカメラを用いたUAVの3次元位置推定の方法について検討する.具体的にはLEDマーカーをUAV下部に取り付け,これをパン・チルトカメラで撮影してマーカー検出と3次元位置推定およびUAVの追跡を行う.屋内では移動しているマーカーの検出,3次元位置推定,カメラのマーカー追跡が可能であることが確認された.しかし,屋外では日光の影響で検出率の低下や誤検出がみられた. | |
| キーワード:3次元位置推定、LEDマーカー、UAV | |
| |
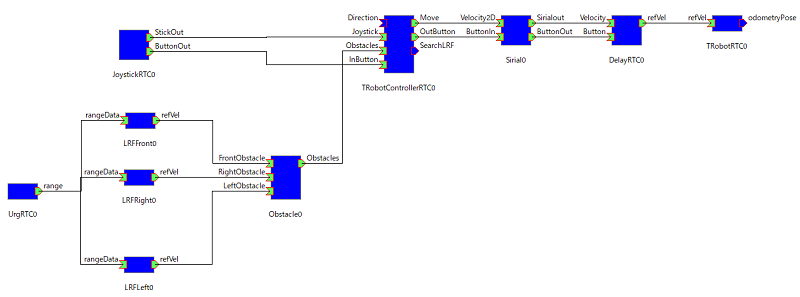
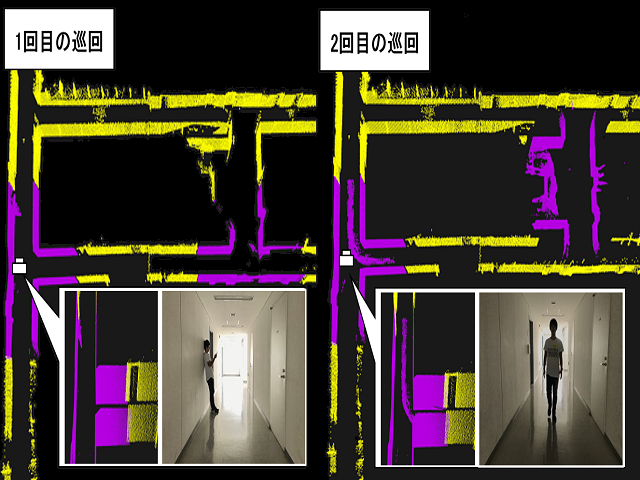
| IS2-D9 | 移動ロボットのための動的環境における3Dマップの巡回更新 |
| 天野 剛志(愛知県立大), 宮川 勲(NTT), 村上 和人(愛知県立大) | |
| 概要:3Dマップ構築の代表的手法としてSLAMが知られているが,3Dマップの広域化にともなう計算コスト上昇を抑制し,動的に変化した情報を3Dマップに反映できるとより使いやすいものとなる.本稿では,3D-LiDARを搭載したロボットが建物内を巡回することを想定し,直前の巡回時との差分から動的変化を検出するとともに,変化が認められた場合のみロボット近傍空間の3D点群の更新を行う巡回更新方法を提案する.提案方法を建物内の巡回に適用させた結果を中心に,提案手法の有効性について議論する. | |
| キーワード:3Dマップ、動的環境、巡回更新 | |
| |
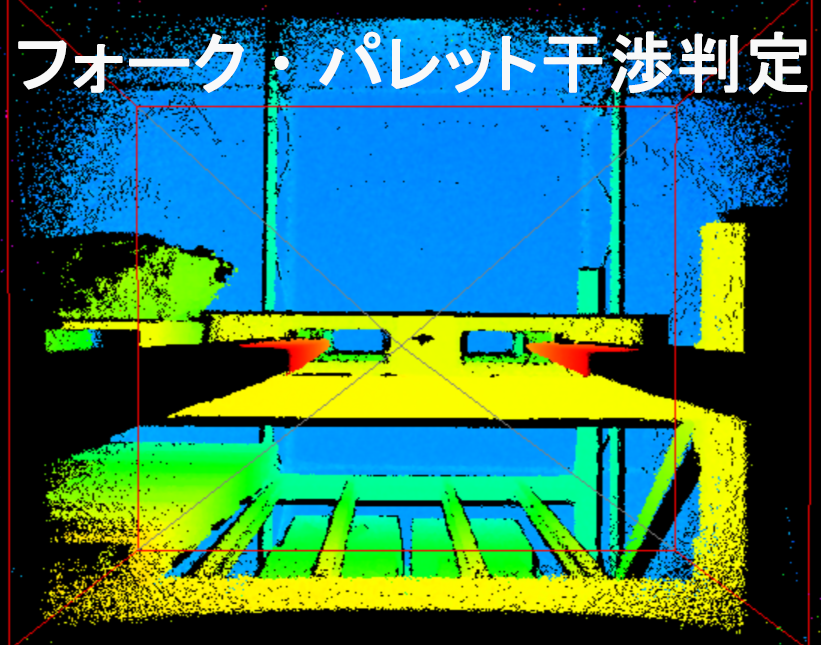
| IS2-D10 | 距離画像を用いたフォークリフトパレットの検出と干渉判定 |
| 寺林 賢司, 福井 海音(富山大), 鈴木 雄士, 日南 敦史(住友ナコフォークリフト), 笹木 亮(富山大) |
|
| 概要:フォークリフトに搭載した距離画像センサを使い、パレットの検出および三次元計測に基づいて、フォーク・パレット間の干渉を判定するシステムを開発した。本システムは、労働力が減少する中、物流量が増加する物流現場において利用することを想定しており、運転経験の少ないフォークリフトドライバーが安全かつ効率的に作業できるようサポートすることを目的としている。 | |
| キーワード:フォークリフト、距離画像、干渉判定 | |
| |
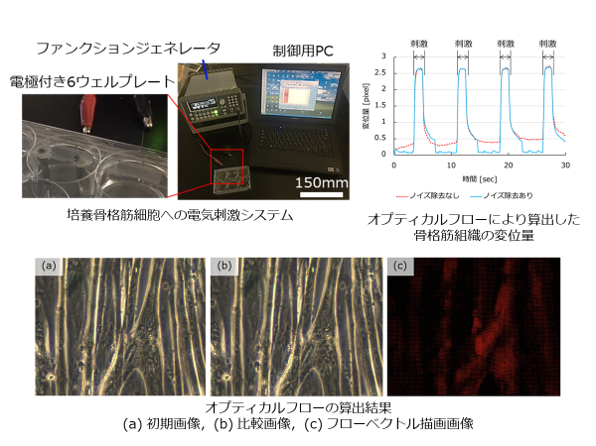
| IS2-D11 | 培養骨格筋細胞の電気刺激応答解析への画像処理技術の適用検討 |
| 中渕 翼, 小西 聡(立命館大) | |
| 概要:本報告では,電気刺激に対する培養骨格筋細胞の応答である収縮運動について,収縮量解析の手法として画像処理技術であるオプティカルフローの適用を検討した.特に,in vitroの培養組織において顕著に見られる浮遊物や組織の変形などの収縮運動以外の挙動をノイズとして定義し,オプティカルフローによる培養組織の変位量算出およびノイズ除去について取り組んだ. | |
| キーワード:培養骨格筋細胞、電気刺激、収縮運動、オプティカルフロー | |
| |