Web 概要集 OS4
タイムテーブル
第1日目:12月6日(木)
| 時刻 | F205・F206 | ホワイエ |
| 9:10 | 開会 | |
| 9:15 | OS1 認識・基礎 | |
| 10:50 | 休 憩 | |
| 11:00 | OS2 メディア・映像 | |
| 12:35 | 昼 食 休 憩 | |
| 13:30 | IS1 インタラクティブセッション IS1-A 認識・基礎(1) IS1-B メディア・映像(1) IS1-C 産業応用(1) IS1-D ロボット・3次元・計測(1) |
|
| 15:00 | 外観検査アルゴリズムコンテスト2018 | |
| 15:20 | SS1:特別企画セッション1 | |
| 16:50 | 休 憩 | |
| 17:00 |
ST1:特別講演1 | |
| 18:30 | 懇親会(ベイブリッジカフェテリア(パシフィコ横浜 会議センター6F)) | |
第2日目:12月7日(金)
| 時刻 | F205・F206 | ホワイエ |
| 9:15 | OS3 産業応用 | |
| 10:50 | 休 憩 | |
| 11:00 | OS4 ロボット・3次元・計測 | |
| 12:35 | 昼 食 休 憩 | |
| 13:30 | IS2 インタラクティブセッション IS2-A 認識・基礎(2) IS2-B メディア・映像(2) IS2-C 産業応用(2) IS2-D ロボット・3次元・計測(2) IS2-E 外観検査アルゴリズムコン テスト2018 |
|
| 15:00 | SS2:特別企画セッション2 | |
| 16:30 | 休 憩 | |
| 16:40 | 小田原賞表彰式 | |
| 16:50 | ST2:特別講演2 | |
| 17:50 | 閉会 | |
- 時間は,変更になる場合があります
- OS□-K:基調講演(30分,質疑応答を含む)
- OS□-O△,SS-O△:オーラル講演(20分,質疑応答を含む)
- OS□-H△:ハイブリットオーラル講演(5分,質疑応答なし)
OS4 : ロボット・3次元・計測 ~ロボティクスはどこまで進化するのか?~
| 12月7日(金) 11:00~12:35 | |
| OS4-K1 | 実世界で働くロボットのためのビジョン・言語処理技術 |
| 羽鳥 潤 氏(Preferred Networks) | |
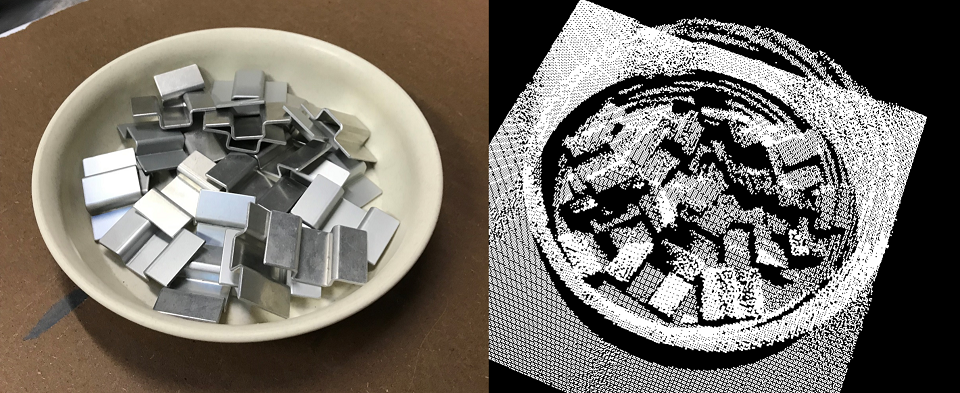
| OS4-O1 | 高速LTMスパース推定による三次元形状計測とばら積みピッキングロボットへの応用 |
| 千葉 直也, 橋本 浩一(東北大) | |
| 概要:Light Transport Matrix (LTM) はプロジェクタ・カメラシステムにおける一画素照射応答画像をまとめた行列である.LTMとエピポーラ幾何から,シーンにおける直接反射成分を取り出すことができ,金属物体や半透明物体も計測できる三次元計測法として応用できる.一方,LTMの計測には莫大な照射・撮影回数が必要である.この問題に対し,スパース推定を適用,さらにいくつかの高速化を行い現実的な計測時間でLTMの推定を行った.また,提案法をロボットビジョンに応用し,ばら積みピッキングを行った. | |
| キーワード:Light Transport Matrix,三次元形状計測,スパース推定 | |
| |
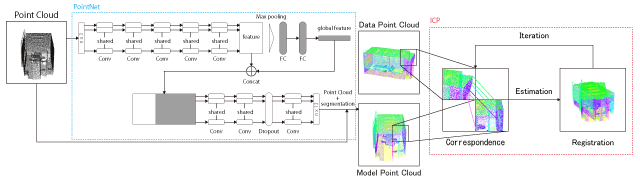
| OS4-O2 | セマンティックセグメンテーションを用いた三次元点群の位置合わせ |
| 山田 皐平, 山下 隆義, 藤吉 弘亘(中部大) | |
| 概要:自己位置推定で用いられるIterative Closest Point(ICP)は,最近傍点の対応付けと剛体変換推定を繰り返すことで,2つの点群の位置合わせを行う.しかし,対応点同士が同一物体に属するか判定していないため,点群の初期位置が大きく離れると,位置合わせを失敗する問題がある.そこで,位置合わせする点群にセマンティックセグメンテーションを行い,各点が属する物体の種類の情報を利用することで,対応点同士が同一物体に属するか判定できる.そのため,本稿では,点群にセマンティックセグメンテーションを行い,セマンティックセグメンテーションラベルを対応付けに用いる手法を提案する.これにより,誤った対応付けを抑制し,ICPよりも更新回数を削減し,同じ更新回数のとき,高精度かつ高速に位置合わせできることを確認した. | |
| キーワード:自己位置推定、位置合わせ、Point Cloud、セマンティックセグメンテーション | |
| |
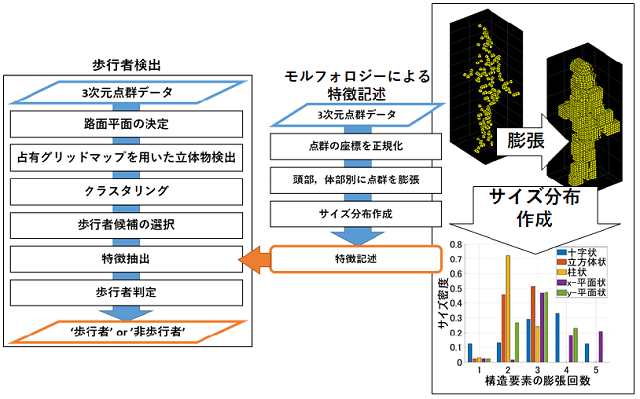
| OS4-H1 | モルフォロジーを用いた歩行者3次元点群の特徴記述 |
| (IS2-D1) | 丸山 健太(九工大), 藤尾 光彦(近畿大), 榎田 修一(九工大) |
| 概要:近年,自動運転に関する技術開発が急激に発展しているが,歩行者の多い一般道路において安全かつ円滑に走行するため,歩行者を正確に認識してやり取りをすることが重要である.本研究では認識を行うためのセンサとしてLIDARを利用する.LIDARにより取得した3次元点群に対して,3次元拡張したモルフォロジー演算を用いてサイズ分布を作成し,特徴記述を行う新たな手法を提案する. 本論文では提案手法の距離別の認識精度を求め,他の手法と比較して有効性を確認した. | |
| キーワード:LIDAR、Mathematical Morphology、歩行者検出 | |
| |
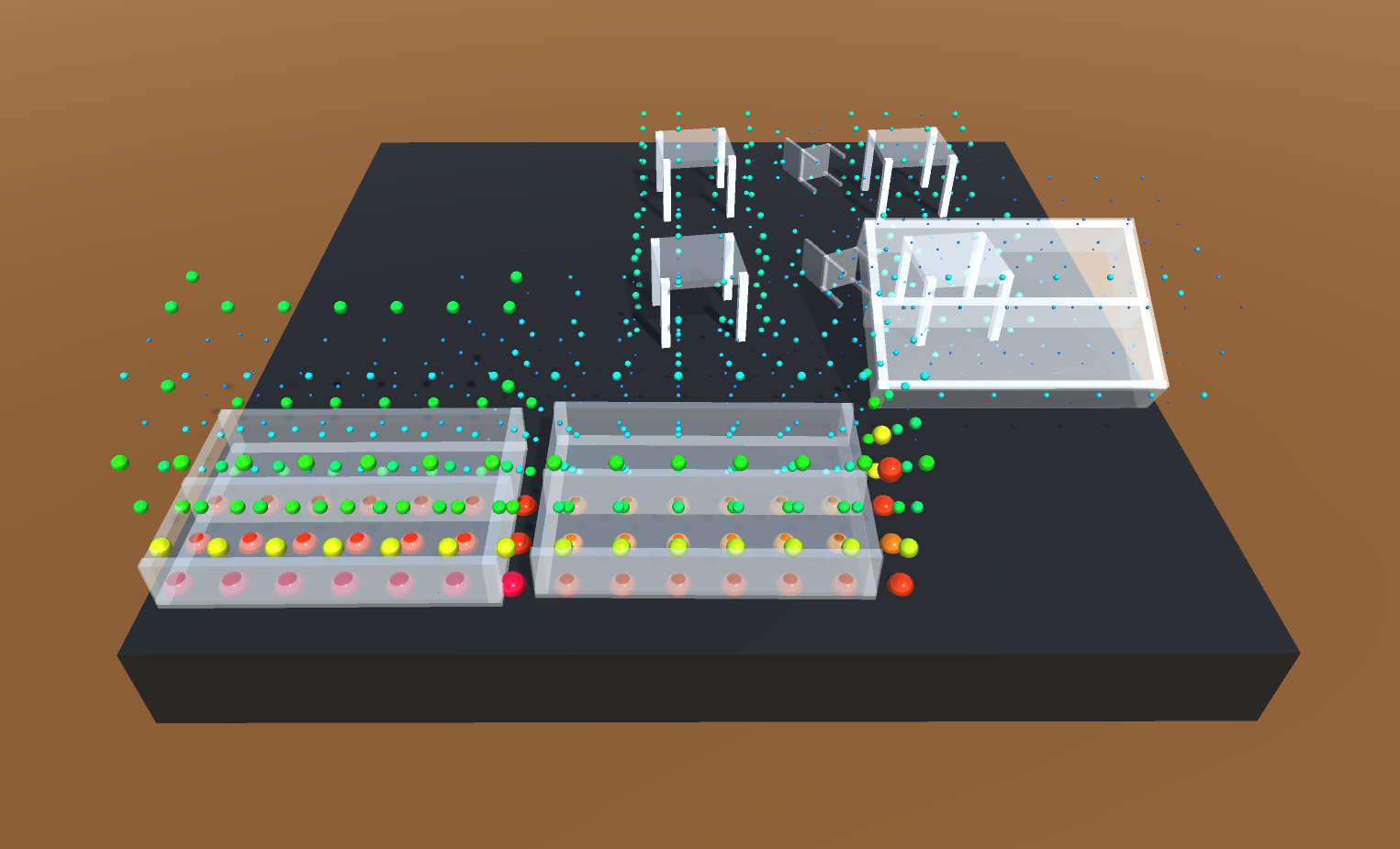
| OS4-H2 | 物理演算に基づく屋内空間地震三次元ハザードマップの生成 |
| (IS2-D3) | 飯樋 遼輝(筑波大, 産総研), 鈴木 亮太(産総研), QIU YUE, 佐藤 雄隆(筑波大, 産総研) |
| 概要:任意の部屋の地震の被害を物理シミュレーションにより解析し,ハザードマップによる可視化やVR空間による体験によってユーザにより直感的に理解させるシステムについて述べる.このシステムにより,地震による被害がどのように生じるのかを任意の部屋に対して容易に把握することが可能になり,ユーザが一般論だけでなく物理的な基準に基づき,実際の自分の部屋における危険な箇所性を把握し未然に対策を講じられるようにすることを目指す.本論文ではシステムの詳細と、それを用いた定性的評価について述べる. | |
| キーワード:物理シミュレーション,ハザードマップ,VR | |
| |
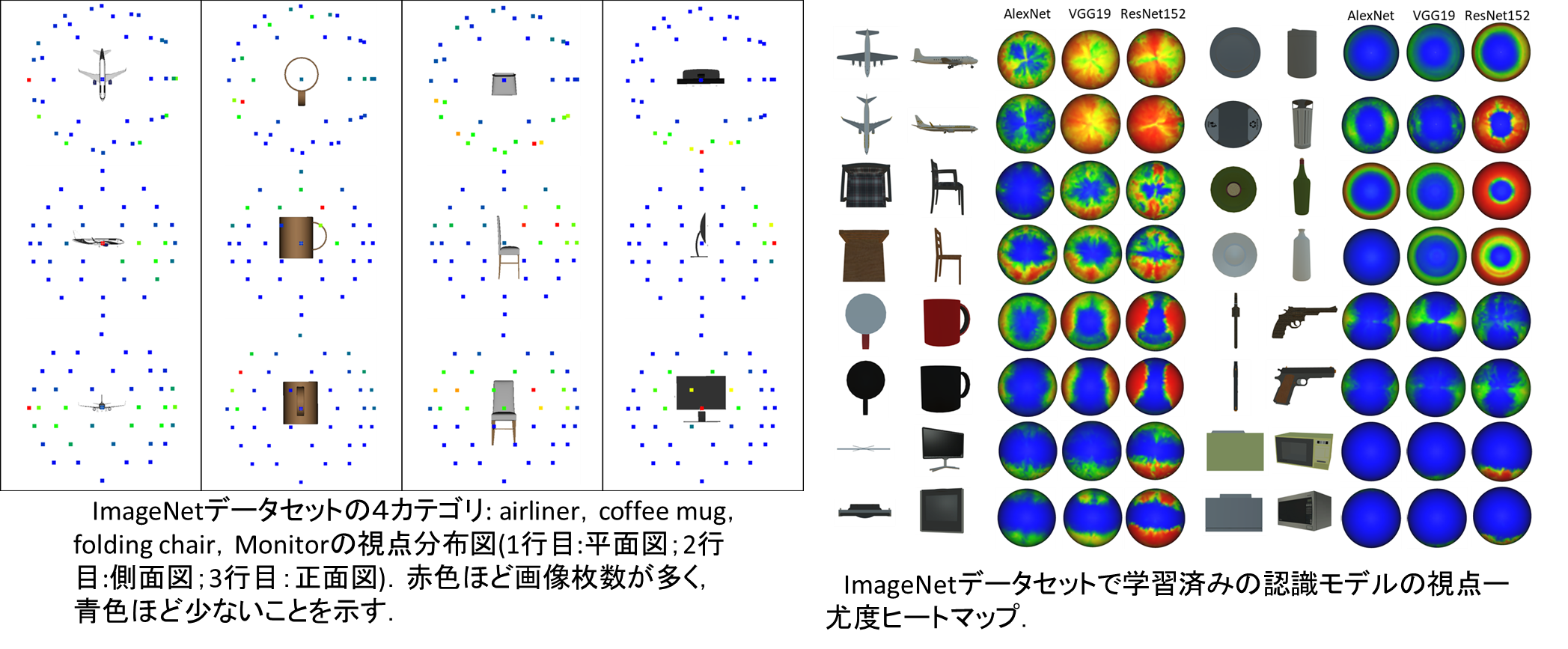
| OS4-H3 | 一般物体認識用大規模画像データセットにおける視点依存性に関する考察および定量化 |
| (IS2-D5) | QIU YUE, 佐藤 雄隆, 鈴木 亮太, 片岡 裕雄(産総研) |
| 概要:実環境で任意のアングルから撮影した画像の認識を行う場合,良好な認識結果を得ることが思いのほか困難であることがある.すなわち、ある物体を認識するにあたって物体を観測する視点(物体を見る方向)に得手不得手が少なからず存在する。これは,人間が撮影を行う際には,対象の形状特徴を最もよく表す視点を必然的に選択するので,そのような画像を収集することで作成された既存の物体認識のための学習用画像データセットに強い視点のバイアスが存在することが原因であると予想される。これまで視点によって認識率が異なることは経験的に知られていたが、定量的に分析した例は無かった。そこで本研究では、本研究では,既存の一般物体認識用大規模画像データセットに視点のバイアスが存在することを明らかにし、且つそれを定量化・可視化することを目指す. | |
| キーワード: 深層学習,物体認識,視点依存性,ヒートマップ | |
| |
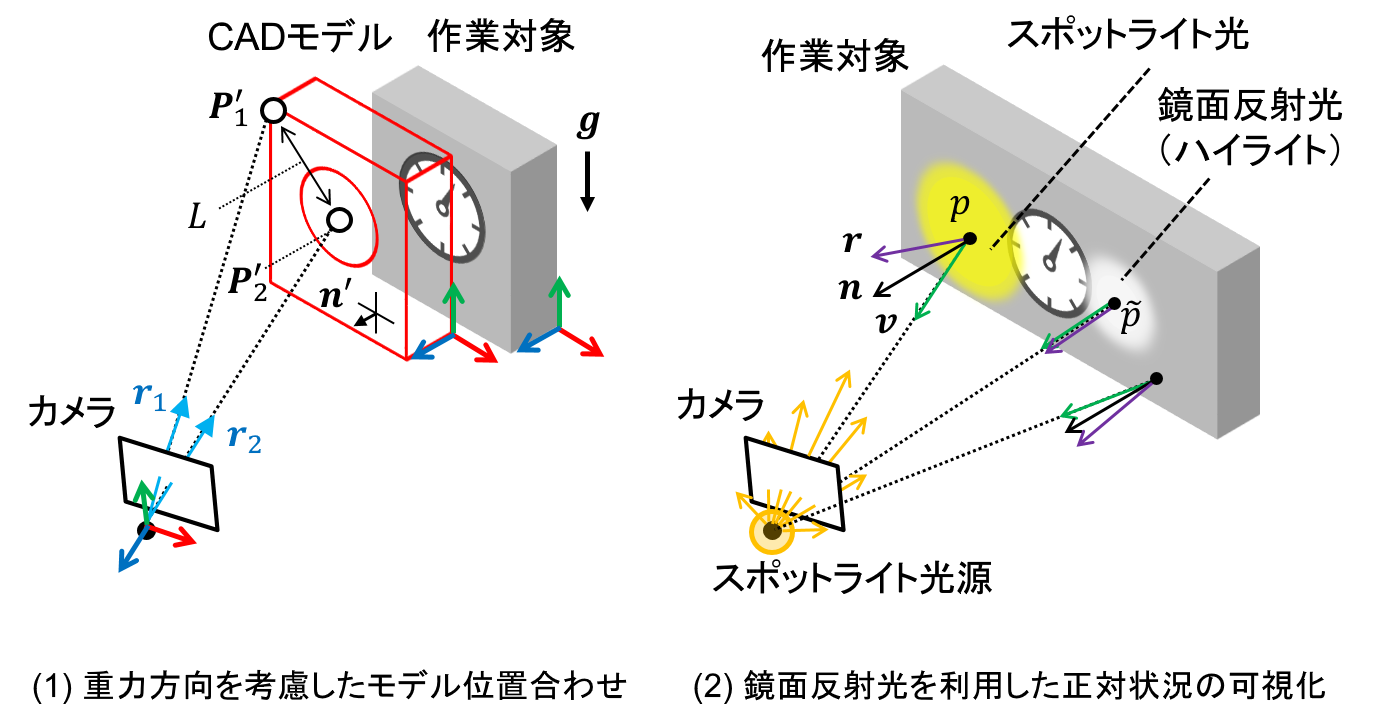
| OS4-H4 | 直感的な視覚フィードバックを与える作業支援ARインタフェース |
| (IS2-D7) | 山尾 創輔, 山田 萌(富士通研), 川竹 翔大(富士通), 姜 山(富士通研), 小松 竜太, 原 英樹(富士通) |
| 概要:画像解析に基づく現場作業支援 AR のための,直感的な視覚フィードバックを与える作業支援ARインタフェースを提案する.提案手法は,実環境の重力方向および仮想的な鏡面反射光を利用することで,モデル位置合わせおよび正対撮影の正確かつ容易な実施を可能にする.提案手法の適用例として,サーバラックの棚卸作業支援 AR システムを構築する.性能評価実験を通し,経験の浅い現場作業者に対して提案手法が有効に機能することを定量的に示す. | |
| キーワード:現場作業支援,AR 技術, モデル位置合わせ,正対状況の可視化 | |
| |