Web 概要集 OS2
タイムテーブル
第1日目:12月6日(木)
| 時刻 | F205・F206 | ホワイエ |
| 9:10 | 開会 | |
| 9:15 | OS1 認識・基礎 | |
| 10:50 | 休 憩 | |
| 11:00 | OS2 メディア・映像 | |
| 12:35 | 昼 食 休 憩 | |
| 13:30 | IS1 インタラクティブセッション IS1-A 認識・基礎(1) IS1-B メディア・映像(1) IS1-C 産業応用(1) IS1-D ロボット・3次元・計測(1) |
|
| 15:00 | 外観検査アルゴリズムコンテスト2018 | |
| 15:20 | SS1:特別企画セッション1 | |
| 16:50 | 休 憩 | |
| 17:00 |
ST1:特別講演1 | |
| 18:30 | 懇親会(ベイブリッジカフェテリア(パシフィコ横浜 会議センター6F)) | |
第2日目:12月7日(金)
| 時刻 | F205・F206 | ホワイエ |
| 9:15 | OS3 産業応用 | |
| 10:50 | 休 憩 | |
| 11:00 | OS4 ロボット・3次元・計測 | |
| 12:35 | 昼 食 休 憩 | |
| 13:30 | IS2 インタラクティブセッション IS2-A 認識・基礎(2) IS2-B メディア・映像(2) IS2-C 産業応用(2) IS2-D ロボット・3次元・計測(2) IS2-E 外観検査アルゴリズムコン テスト2018 |
|
| 15:00 | SS2:特別企画セッション2 | |
| 16:30 | 休 憩 | |
| 16:40 | 小田原賞表彰式 | |
| 16:50 | ST2:特別講演2 | |
| 17:50 | 閉会 | |
- 時間は,変更になる場合があります
- OS□-K:基調講演(30分,質疑応答を含む)
- OS□-O△,SS-O△:オーラル講演(20分,質疑応答を含む)
- OS□-H△:ハイブリットオーラル講演(5分,質疑応答なし)
OS2 : メディア・映像 ~スポーツ映像解析の可能性を再探求~
| 12月6日(木) 11:00~12:35 | |
| OS2-K1 | ラグビー映像解析によるプレー分析の効率化とその応用 |
| 大内 一成 氏(東芝) | |
| OS2-K2 | 多視点ロボットカメラを用いた三次元映像表現の研究 |
| 池谷 健佑 氏(NHK技研) | |
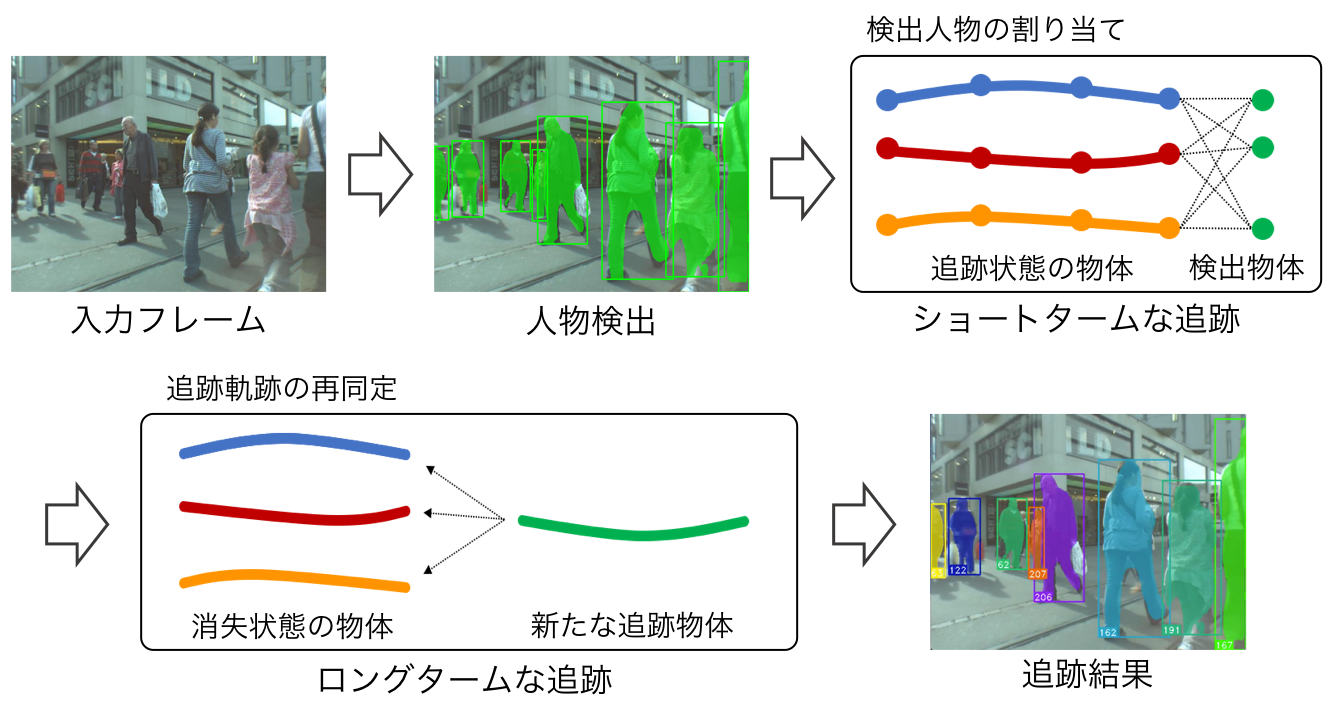
| OS2-O1 | 追跡軌跡の再同定を用いたオンライン複数物体追跡 |
| 加藤 直樹(慶應大), 田靡 雅基, 古山 純子, 里 雄二(パナソニック), 青木 義満(慶應大) | |
| 概要:我々は追跡軌跡の再同定により一度消失した追跡対象を再び追跡状態へと移行させる物体追跡手法を提案する.物体の高次元な見え特徴を表す埋め込みベクトルを畳み込みニューラルネットワークを用いて取得し,追跡軌跡同士の埋め込みベクトルの距離によって追跡軌跡の再同定判定を行う.追跡軌跡ペアの再同定判定は低次元なベクトル同士の距離に基づいて行われるため,再同定判定を行うことによる計算コストの増加は僅かである.公開データセットであるMOT16データセットを用いて評価実験を行い,本手法の有効性を示す. | |
| キーワード:物体追跡、畳み込みニューラルネットワーク、埋め込みベクトル | |
| |
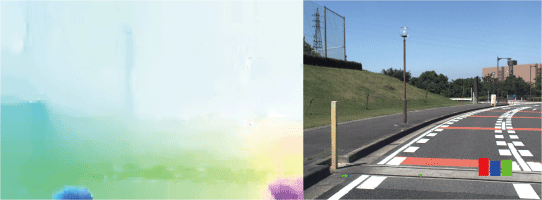
| OS2-H1 | フローヒストグラムを用いたRecurrent Neural Networkによる自己移動量推定 |
| (IS1-B1) | 阿知破 千浩, 福井 宏, 山下 隆義, 藤吉 弘亘(中部大) |
| 概要:自動運転支援において,自車の位置や運動を把握することは重要て゛ある.Convolutional-Recurrent Ne ural Network(C-RNN)は,画像から自己運動の識別か゛可能て゛ある.一方て゛,C-RNNは詳細な自己移動量の推 定か゛て゛きないという問題か゛ある.そこて゛本研究て゛は,C-RNNを自己移動量推定に拡張する.その際,シーンに 頑健な推定か゛可能となる入力方法としてフローヒストク゛ラムを用いる.評価実験の結果,従来のRNNより高精度 に自己移動量の推定か゛可能なことを確認した. | |
| キーワード:自己移動量推定、Recurrent Neural Network、フローヒストグラム | |
| |
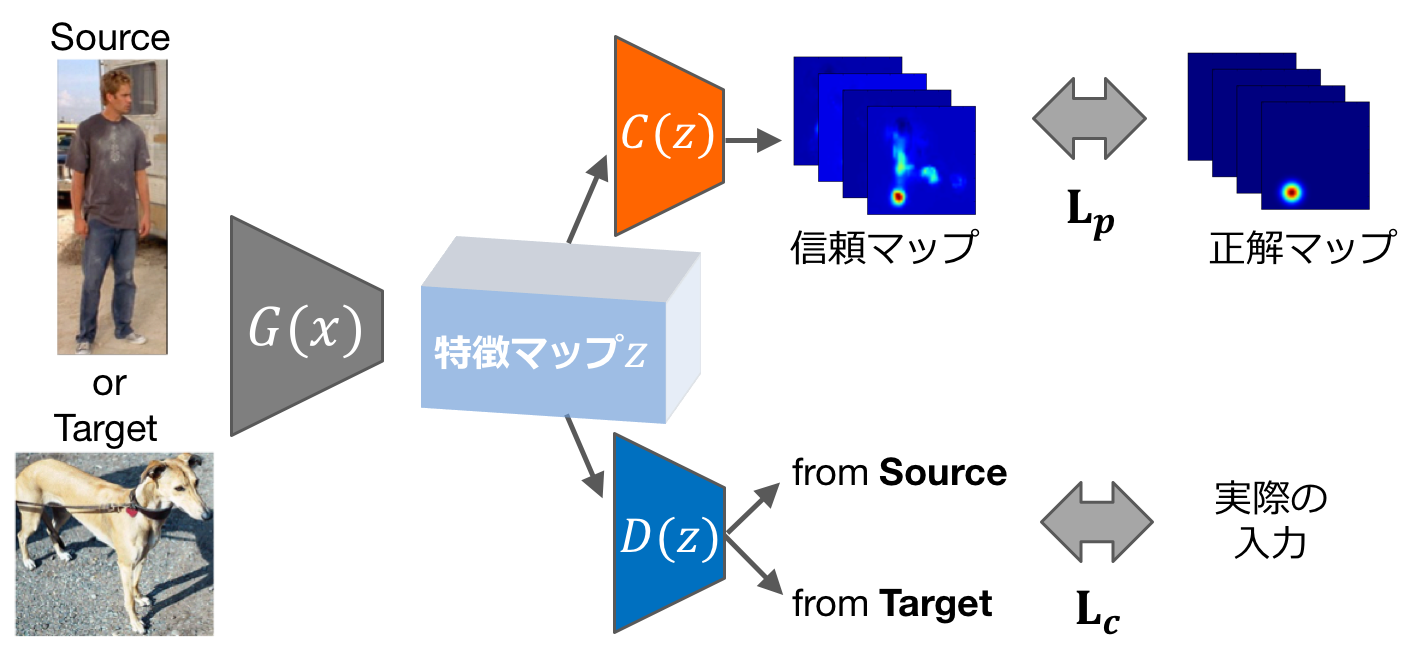
| OS2-H2 | 敵対的学習を用いた2次元姿勢推定における教師なしドメイン適応 |
| (IS1-B5) | 鈴木 智之(慶應大), 田中 希武(コニカミノルタ), 青木 義満(慶應大) |
| 概要:Convolutional Neural Networkと大量の教師ありデータにより2次元姿勢推定のベンチマークデータセットにおける精度向上は著しいが,ドメイン(撮影環境・推定対象)の変化による推定精度の低下は依然として大きな課題である.本研究では,敵対的学習を用いたドメイン適応を特徴マップの座標単位で行う手法を提案し,教師がないドメインの姿勢推定精度の改善を行った. | |
| キーワード:ドメイン適応,姿勢推定,敵対的学習,Convolutional Neural Network | |
| |