|
|
|
| 12/5(木) 13:25-15:00 |
コーディネータ:岩崎准一(北海道電力)
|
|
IS1-F1
|
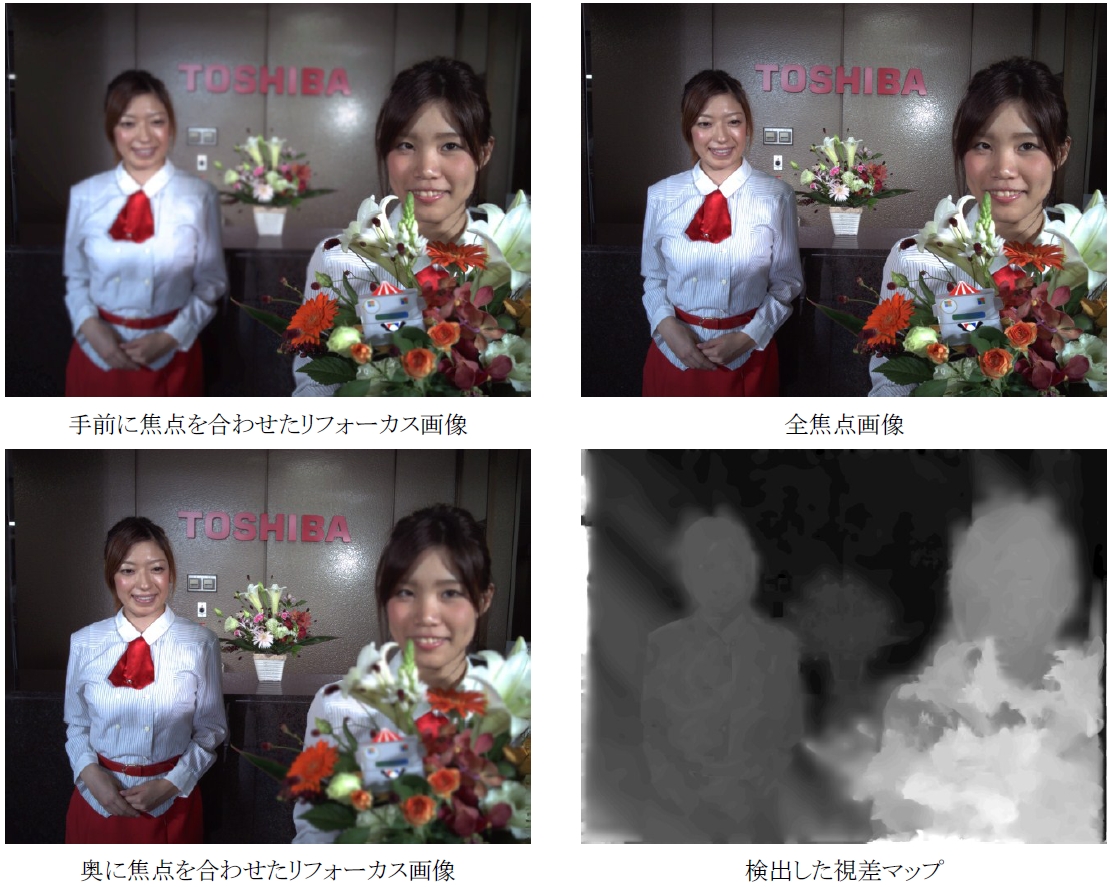
ステレオカメラを用いたデジタルリフォーカス
|
| |
○山本琢麿,三島直,井田孝,森達矢,檜田和浩,木村克行(東芝)
|
概要:ステレオカメラを用いたリフォーカス手法を提案する.従来のリフォーカス手法では,画像の精確な領域分割が必要で複雑なシーンへの適用が難しいことや,符号化開口やPlenopticカメラなどのコンピュテーショナルカメラを用いるためカメラ内部を改変する必要があった.提案法では,通常のステレオカメラで取得した視差画像から画素毎のぼけ量を推定し,ぼけの付加と復元を行う.領域分割が不要なため複雑なシーンへの適用が可能で,カメラ内部の改変は必要なくハードウェア構成がシンプルな利点がある.
<キーワード>リフォーカス,ぼけ復元,ステレオ
|
|
|
IS1-F2
|
三次元計測に基づく適応的画面投影システム
|
| |
○村山裕規,斉藤友彦,鷲見和彦(青学大)
|
概要:プロジェクタを用いたプレゼンテーションを行う際,スクリーンの前に講演者が立つと影が発生する.また,このとき講演者が聴衆の方向に顔を向けると眩しい状態に陥る.本論文では,深度センサで講演者の位置を計測してスクリーン上の影となる部分をもう1台の補助プロジェクタで補間する投影システムを提案する.このとき2台のプロジェクタの境界線を目立たないようにするため,Shai AvidanのSeam Carvingを応用する.
<キーワード>プロジェクタ,深度センサ,Seam Carving
|
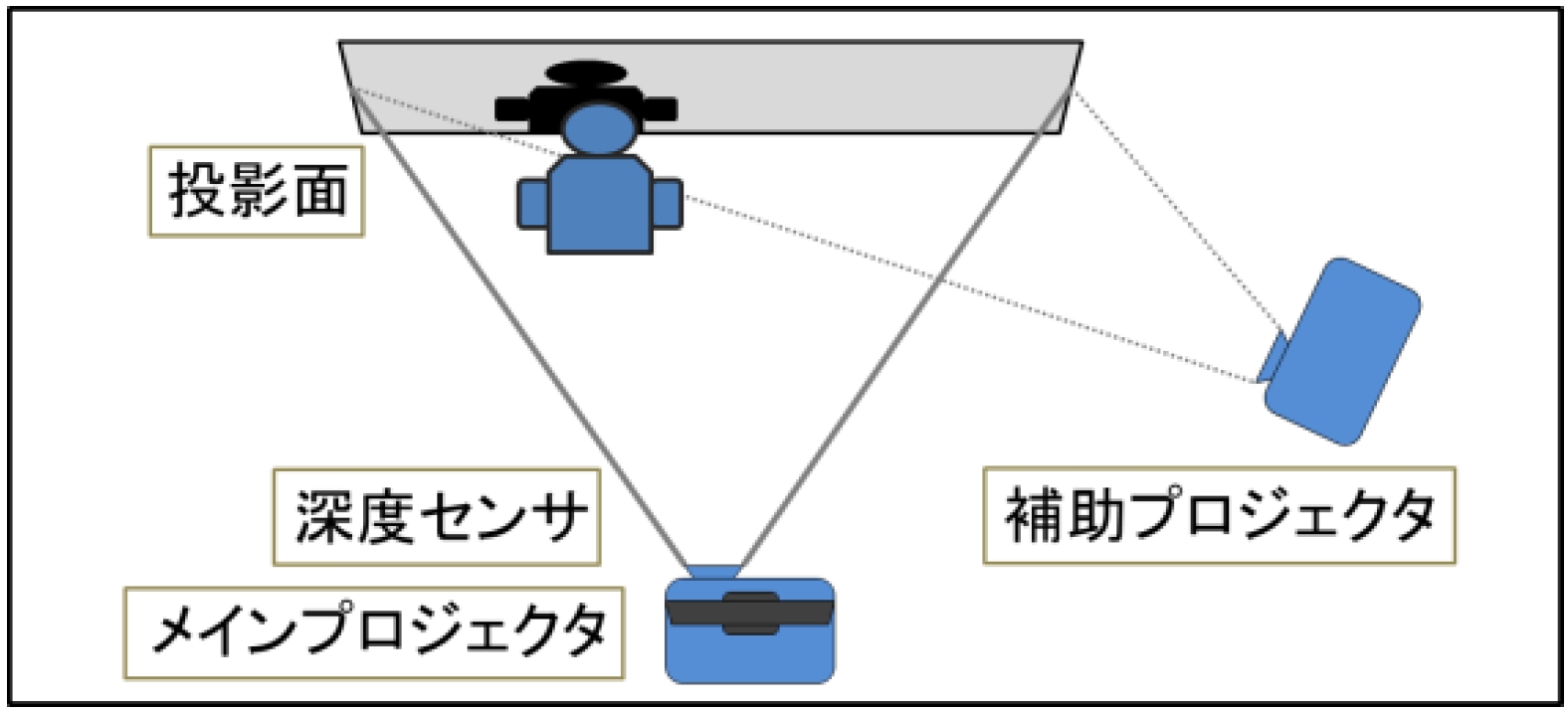
投影システムの構成
|
|
IS1-F3
|
地上型レーザスキャナによる森林情報のデジタルドキュメント化
|
| |
○中村裕幸,石井彰(woodinfo),
平岡裕一郎,高橋誠(森林総研林木育種センター)
|
概要:地上型レーザスキャナを用いた森林資源調査システムにより生成される樹幹直径および樹高の推定精度について報告する。実測値と推定値の樹幹直径における差の平均値は-0.88cm標準偏差0.715、寄与率0.975である。樹高においては平均値-0.29m、標準偏差0.673、寄与率0.903であり、システムの説明力は非常に高い。少数である推定値が大きく異なる対象木に関し、単木単位で種々の検索条件と、3D表示による再計測・修正機能を付与することで、システムの実用性を向上させた。
<キーワード>森林情報,地上型レーザスキャナ,デジタルドキュメント
|
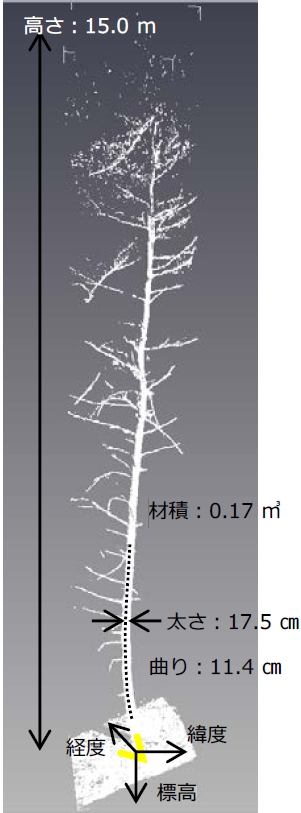
森林資源調査システムにより自動生成される森林情報
|
|
IS1-F4
|
福島第一原子力発電所のがれき除去作業へのリアルタイム3次元再構成技術の適用
|
| (OS2-H1) | |
○関晃仁,Oliver Woodford、Riccardo Gherardi,畠山誠,島村淳一,
岡田隆三,Bjorn Stenger,Roberto Cipolla(東芝)
|
概要:福島第一原子力発電所の事故収束と廃炉へ向けた現場状況の確認と作業計画の立案のために,画像を利用した3次元再構成技術による3次元計測を行った.3次元再構成の成否および精度を現場で確認するために,原子炉建屋上空で撮影された映像を構内の遠隔操作室に設置したラップトップPCにオンラインで取り込み,リアルタイム処理を実現した.緻密な3次元点群とリアルタイム処理のために,カメラの運動推定と密な3次元形状復元とを2段階の処理とし,前段の比較的複雑な処理をCPU,並列処理が可能な後段をGPUで計算を行うことで,全体としてリアルタイムに処理を行う.最後に現場で撮影された映像を使った計測結果およびそれを使って工事計画
に用いる3DCAD図面を作成した例を示す.
<キーワード>3次元再構成,3次元計測,GPU,リアルタイム,福島第一原子力発電所
|
.jpg)
|
|
IS1-F5
|
角型容器越し複光路単眼ステレオによる水中物体の3次元形状計測
|
| (OS2-H2) | |
○伊部公紀,小林祐一,金子透(静岡大),山下淳(東大)
|
概要:直方体形状の角型水槽容器内に置かれた水中物体を容器四隅の一角から観察すると角
を構成する2 つの面のそれぞれが光路となり複光路像が生じる.角を構成する2 平面が直角となる
容器を対象とし,単眼カメラを用いて容器の直角面越しに撮影した複光路単眼ステレオ画像から
バンドル調整により直角面の姿勢推定を行い,光線追跡により水中物体の3 次元形状を計測する
手法を提案する.また,実験により提案手法の有効性を示す.
<キーワード>水中物体計測,画像センシング,複光路単眼ステレオ
|
.jpg)
ステレオカメラや特殊な複プリズムなどを用いずに
容器の特性を利用して水中物体の3 次元計測
|
|
IS1-F6
|
RGB-Dカメラから得られるDepthデータの歪み補正
|
| (OS2-H3) | |
○佐藤雄隆,岩田健司,永見武司(産総研),竹内啓五(清水建設)
|
概要:Kinect やXtion に代表される安価なRGB-D カメラが近年利用可能となり,様々な応用が
試みられている.これらは,パタン投影を行うアクティブ方式であるため,パッシブ方式のステレオ
カメラなどと比較して欠損の少ない密な距離データを容易に得ることができる利点がある.一方,
計測を目的としたデバイスでないこともあり,得られる距離データは大きな歪みを持ち,カメラ間の
歪みの個体差も大きい.本稿では,歪み特性の分析結果と,その補正方法について述べる.
<キーワード>RGB-D カメラ,Xtion,Kinect,キャリブレーション
|
.jpg)
室内をXtion で撮影した3D ポイントクラウドの
補正前(左)および補正後(右)
|
|
IS1-F7
|
格子パターンによるアクティブ3次元形状計測手法のパッシブステレオ法による高密度化
|
| (OS2-H4) | |
○河野歩実,古川亮,日浦慎作,青山正人,宮崎大輔,
馬場雅志(広島市大),佐川立昌(産総研),川崎洋(鹿児島大)
|
概要:本論文では,プロジェクタとカメラを用いたアクティブ3次元形状計測の計測結果を,パッシブステレオ法で再処理することで,元の結果に比べ高密度な3次元形状を得ることを試みる.平行線パターンを用いるアクティブ計測では,パターンが投影された所しか復元されない問題がある.これをパッシブステレオとの併用によりパターンの間を補間する.この際,ステレオ画像において平行線パターンの対応関係が既知であることを用いて,ステレオマッチングの処理を安定化させる.
<キーワード>3次元形状計測,アクティブ3次元形状計測,パッシブステレオ法
|
.jpg)
提案手法による3次元形状復元
|
|
IS1-F8
|
ワンショットDHMを用いた油液表面の三次元形状計測
|
| (OS2-H5) | |
○ウキエツ,田口亮,梅崎太造(名工大),保黒政大(中部大),
堀米秀嘉(ホーリーマイン)
|
概要:近年,3Dプリンタなどの普及に伴い,さまざまな物体の三次元形状計測のニーズが高まってきている.しかし,既存の三次元計測手法では計測の難しい測定対象はまだまだ多く、特に、流動している透明な液体表面に対する高精度な計測は極めて困難であった.本研究では,干渉縞の周波数解析法を利用し,ワンショット位相シフトデジタルホログラフィによる三次元計測システムを構築することで,安価かつ高速・高精度の液体表面三次元形状計測システムを開発する.
<キーワード>光学システム,デジタルホログラフィ,三次元計測
|
.jpg)
油液表面の三次元計測結果
|

