|
|
|
| 12/6(金) 13:25-15:00 |
コーディネータ:高氏秀則(室蘭工大)
|
|
IS2-B1
|
装着式小型視線検出装置の開発
|
| |
○松井恵佑,清水毅,小谷信司(山梨大)
|
概要:本論文では,小型の装着可能な視線検出装置を開発し,ステレオカメラが人間の頭部に追従
するアルゴリズムを検討した.人間の注視点検出には視線検出と頭部運動の検出の2 つの要素があ
る.視線検出には,瞳孔中心の検出による眼球運動の追従を行った.頭部運動検出には,装置に取り
付けられた複数のLED を検出し,位置関係により姿勢の推定を行った.これらをリアルタイムに行うため
に,早い画像処理速度と検出精度の両立を実現する画像処理方法を提案し,その有用性を検証した.
<キーワード>小型装置,視線追従,リアルタイム
|

視線検出装置
|
|
IS2-B2
|
3組の光学系を用いた眼鏡着用者における瞳孔検出の改善
|
| |
○山川大貴 福元清剛 海老澤嘉伸(静岡大)
|
概要:赤外線光源を用いた瞳孔検出に基づく注視点検出装置は,眼鏡を着用した使用者の場合,光源による眼鏡反射像が瞳孔として認識され,誤検出につながりやすい.本研究では,デジタルサイネージを想定し,遠距離において眼鏡反射が発生する状況であっても正確に瞳孔検出が可能なシステムを提案する.従来2台だったカメラを3台に増やすとともに,従来の眼鏡反射対応手法に新しい方法を加えた.真の瞳孔と眼鏡反射の区別がより正しくでき,誤検出を減少させた.
<キーワード>瞳孔検出,眼鏡反射,注視点検出,フレーム反射
|
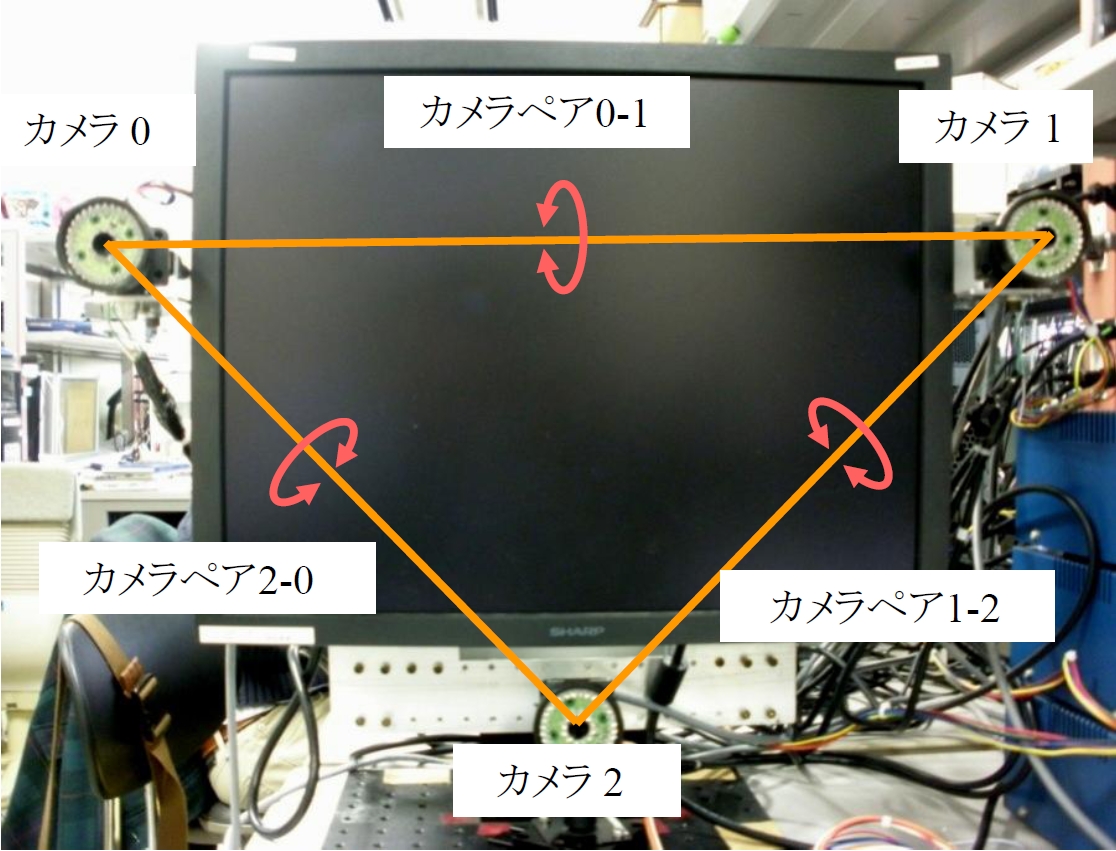
装置構成
|
|
IS2-B3
|
2組の注視点検出装置による前後の頭部移動許容範囲の広範囲化の試み
|
| |
○山部篤志,福元清剛,海老澤嘉伸(静岡大)
|
概要:我々は,これまでにPC 画面からの距離が70〜90 cm の範囲で頭部移動を許容しながら,平均で約0.9
deg の誤差で注視点検出が可能な瞳孔-角膜反射法に基づく装置を開発している.より広範囲の頭部移動を許
容するためには,注視点検出に必要な特徴点(瞳孔と角膜反射)のピンボケのない画像取得が必要である.本
研究では,焦点距離の異なるレンズを用いた近距離用と遠距離用の注視点検出装置2 組を組み合わせた装置
を開発し,その結果,60〜100 cm の広範囲において平均で約1.5 deg の誤差で注視点検出が可能となった.
<キーワード>注視点検出,ヒューマン・インターフェース,頭部移動
|
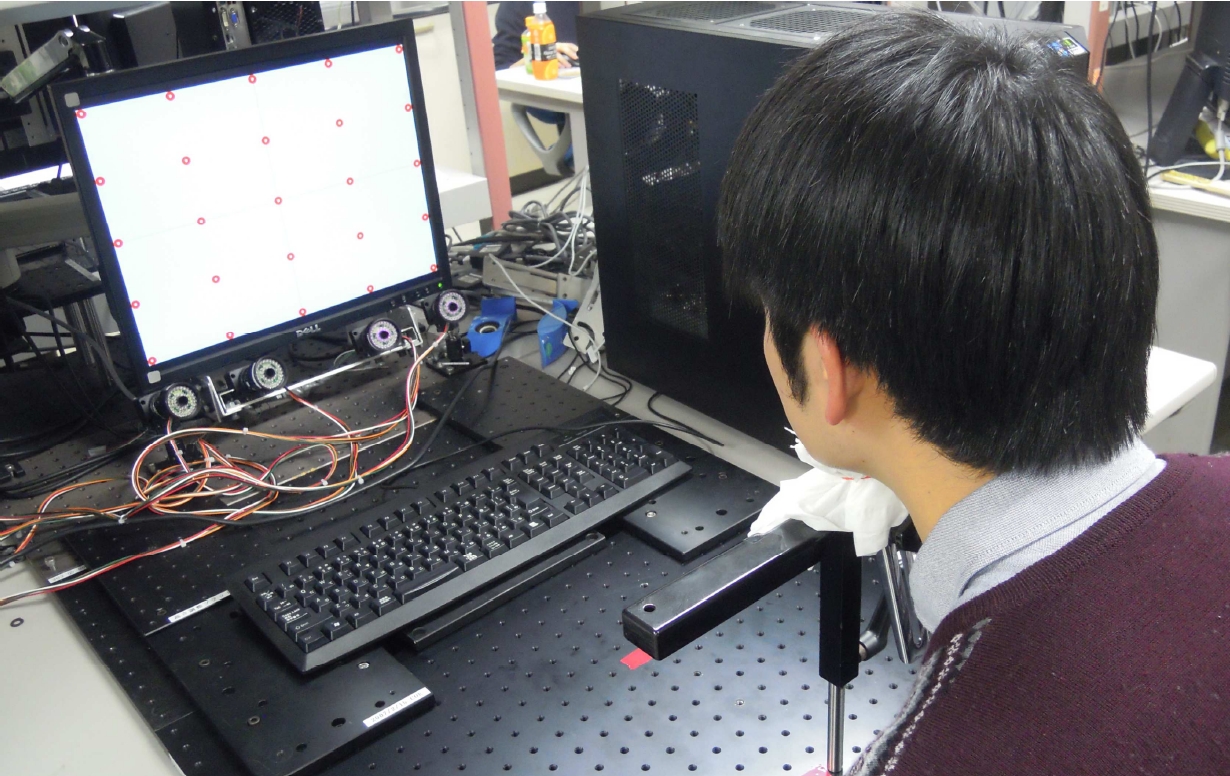
装置構成と実験風景
|
|
IS2-B4
|
スマートフォン利用者の瞬き検出方法に関する一検討
|
| |
○岡村拓紀,鶴岡浩平,戸田健(日大)
|
概要:近年,スマートデバイスの普及率の増加に伴いPC,スマートデバイスの利用時間が長時間
化しており,VDT 症候群の増加も懸念されている.本研究では,スマートデバイスの利用者の瞬き
をスマートデバイスの内臓カメラを用いて検出することを検討する.一般的なPC とWeb カメラを用
いる場合と異なり,カメラのフレームレートが遅いことや,CPU の性能,RAM の容量が問題となる.
従って上記の問題でも瞬き検出率を高める方法について検討する.
<キーワード>瞬き検出,コンピュータ,視覚情報端末
|
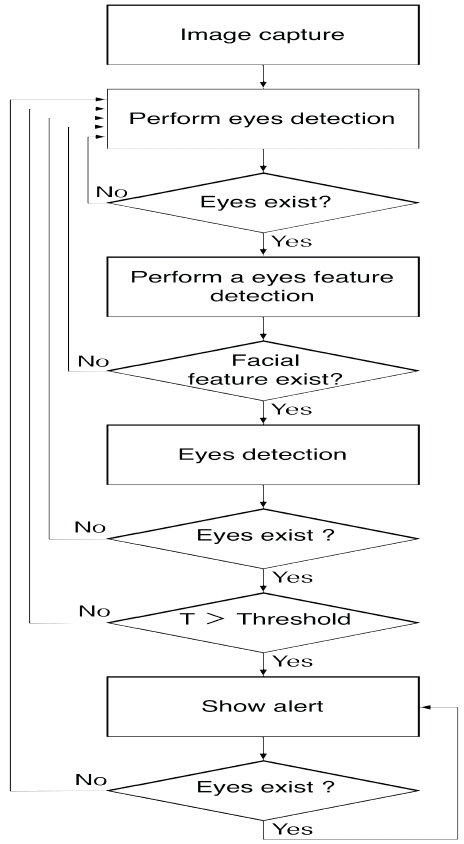
提案システム
|
|
IS2-B5
|
フレームレートの動的変化に堅牢な瞬き検出法に関する一提案
|
| |
○宮川達彦,鶴岡浩平,戸田健(日大)
|
概要:本研究では,VDT ユーザ用のVDT 内臓カメラにおけるfps 変化に堅牢な瞬き検出方法
を提案する.検出はテンプレートマッチング法を用い,目の開いた画像をテンプレートとし,フレー
ム毎の相関値が閾値より低いと瞬きとする.従来手法は固定閾値を用いるが,提案手法ではフレ
ーム毎に閾値を変動させる。実験からfps が30 から6 fps と変化するのに対し,従来手法は検出率
が91.4%から80.6%まで悪化した。他方、提案手法は92.2%から90.1%と堅牢な結果となった。
<キーワード>瞬き検出,Visual display terminal (VDT), Web カメラ
|
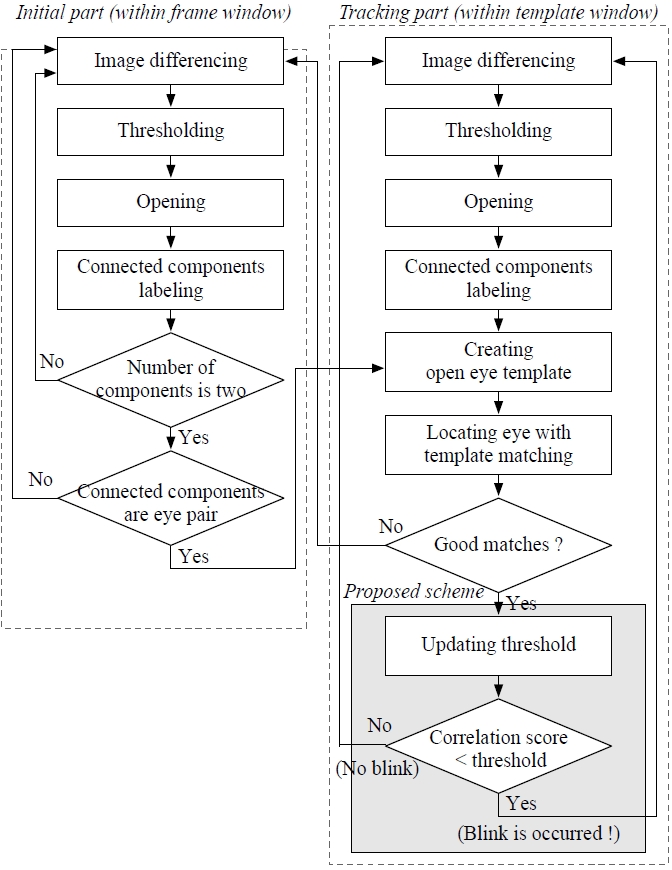
提案システムの画像処理フロー
|
IS2-B6
|
口元の動きの測定とその応用に関する一検討
|
| |
○古川大祐,戸田健(日大),鄭一(Tei Hajime Clinic)
|
概要:食事が欧米化し食事時間が減少していき,それに伴い咀嚼回数も急速に減少している.
咀嚼回数が減った事により現代人には様々な悪影響が出てきており、その代表例が肥満と歯周病
である.また,咀嚼による脳内血流量の増加や交感神経,副交感神経の機能促進効果等,咀嚼と
身体とのさまざまな関係性がある.本研究ではweb カメラを用いてVDT 作業中に被験者にガムを
摂食させた際の口元の動きを測定し,咀嚼を判別する.また,測定結果を応用し咀嚼による人体
への影響を測定する.
<キーワード>咀嚼,食事,VDT
|
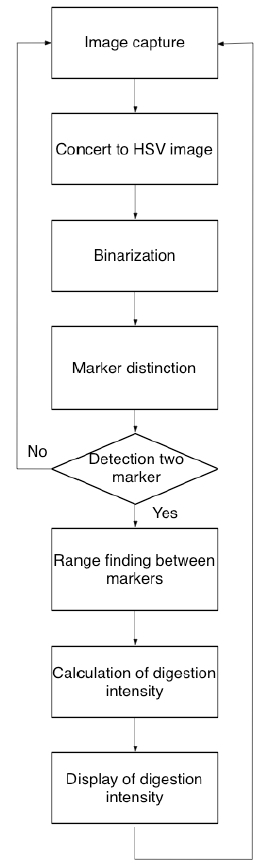
システムの機能構成
|
|
IS2-B7
|
ニューラルネットワークによる二次元顔画像からの顔向き推定
|
| |
○柳琢磨,加藤嗣,田口亮(名工大),保黒政大(中部大),
梅崎太造(名工大)
|
概要:顔認証では顔の大きさと角度を正規化した顔画像を必要とする.しかし,上下左右を向いた顔
で目と鼻の検出をするのは難しく,正規化を正しく行うことができない.そこでニューラルネットワークを
使用して右目,左目,鼻の位置を学習し,各々専用の検出器を用いることで顔向きに頑健な目と鼻の
検出を実現する.評価実験において目と鼻の位置検出率は単独フレームで平均82.3[%]であることを
確認した.また,目と鼻の位置から顔向き推定を行い,5[度]の分解能に対する認識実験の結果,平
均二乗平方根誤差が5.07[度]であることを確認した.
<キーワード>ニューラルネットワーク,特徴量抽出,向き推定,顔認証
|
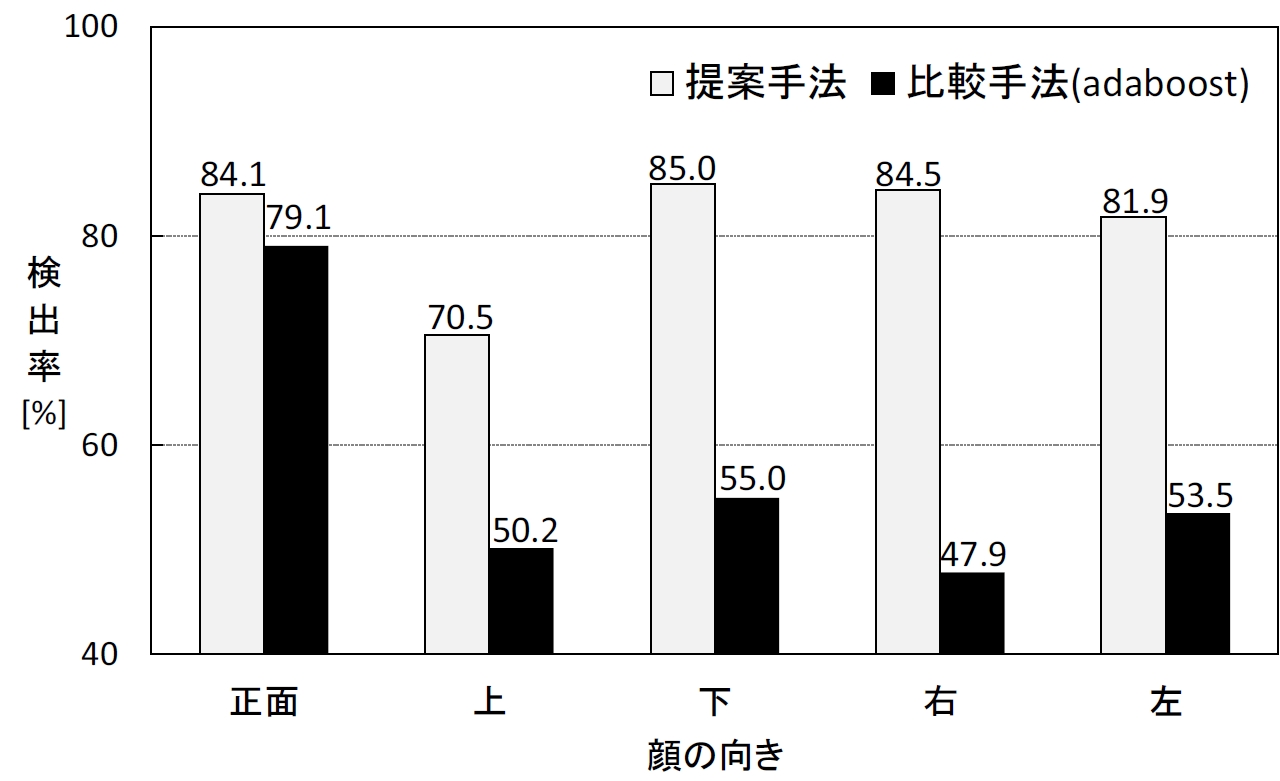
提案手法と比較手法の目と鼻検出結果
|
|
IS2-B8
|
顔検出に基づく飛行型撮影ロボットの開発
|
| |
○鈴木聡(香川大),満倉靖恵(慶大)
|
概要:本研究では,娯楽施設内を動き回り人々の記念写真を撮る飛行型撮影ロボットを開発することを目的とする.ロボットは自身に搭載された単眼カメラの画像のみを利用してターゲットとなる人物に近づく.提案手法では,ロボットの動作は顔検出結果を利用して決定される.提案手法の有効性を検証するために,飛行型撮影ロボットを用いた実験を行なった.実験の結果,ロボットはターゲットとなる人物を追尾し,追尾後には写真撮影を行なうことができた.
<キーワード>飛行ロボット,写真撮影,顔検出
|
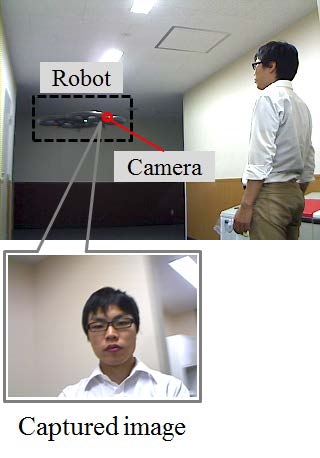
飛行ロボットによる人物追尾
|
|

