- IS2-B ロボットビジョン
IS2-B1
| 閉曲線内特徴量による一般マーカの検出 |
|
○亀山悟,藤原伸行,宍道洋(明電舎)
|
|
マーカとして利用できる物体の多くが何らかの枠で囲まれていることに注目し,閉曲線を利用したマーカ検出方法として閉曲線内特徴量を開発した.閉曲線内特徴量とは,閉曲線の内部を閉曲線全体の向きに合わせてブロック分割し,ブロック毎の濃淡情報をHaar-Like特徴量により抽出したものを並べた高次元ベクトル特徴量である.実験の結果,閉曲線内特徴量を利用することでマーカのサイズ変化や回転変化・明るさ変化に頑健にマーカ検出が行えることを確認した.
<キーワード>マーカ検出,閉曲線内特徴量,Haar-Likeフィルタ |
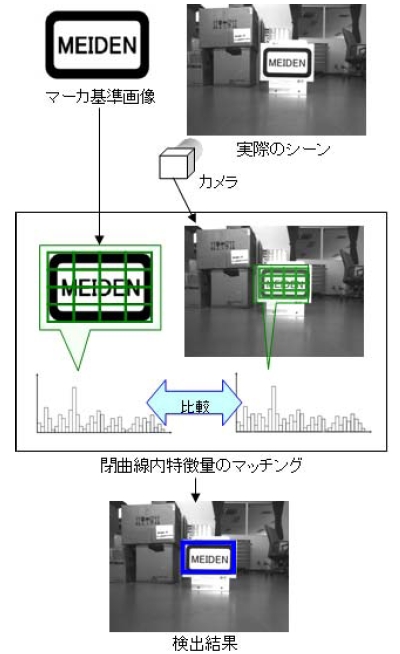 閉曲線内特徴量によるマーカ検出の概要 |
IS2-B2
| 局所特徴とマーカーを用いたRGB-Dカメラによる生産設備の形状計測 |
|
○原孝介,安倍満,佐藤育郎(デンソーアイティーラボラトリ),神谷孝二(デンソーウェーブ)
|
|
生産設備向けのRGB-Dカメラを使った形状計測を提案する.手に持ったRGB-Dカメラを使って複数視点から生産設備を撮影し,画像からカメラ姿勢を推定することで貼り合わせる.本研究では生産設備に適した構成として,リアルタイム復元とバッチ復元の組み合わせを提案する.さらに局所特徴とマーカーを併用することで精度の良い形状計測を実現した.
<キーワード>SLAM,局所特徴,マーカー |
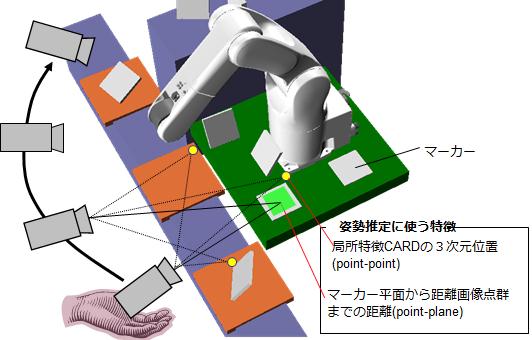 RGB-Dカメラによる生産設備の計測 |
IS2-B3
| (12/6より公開開始) 回転不変特徴量とアンサンブル分類木を用いたバラ積み工業部品の位置推定 |
|
○江田明宏,市野雄大,榎田修一,江島俊朗(九工大), 河野寿之,出口央,堀内智之(安川電機) |
|
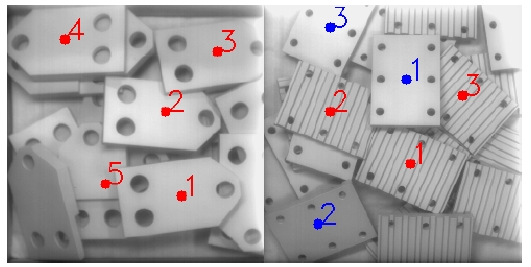
工場の自動化に伴い,バラ積み工業部品の位置姿勢推定に関する研究は,盛んに行われている.その中でも,詳細な位置姿勢推定の前に2次元画像から概略位置推定を行うことは,有効な手段である.本研究では,Difference-of-Gaussianを利用した回転不変特徴量と,識別器としてアンサンブル分類木を利用することで,バラ積み工業部品からの概略位置推定を実現した.新たな回転不変特徴量と特徴量の次元数削減法を提案し,その有効性を実験で記述する.
<キーワード> ビンピッキング,回転不変特徴量,アンサンブル分類木,2次元画像 |
 |
IS2-B4
| 特殊環境下における低床型自律無人搬送車の地図生成手法 |
|
○鹿田和稔,中沢実(金沢工大)
|
|
クリーンルームや超高低温倉庫などの特殊環境下でAGVを運用するため,磁気テープや磁気棒に頼らず自律的に制御するAGVの導入を考える.自律的に行動するためには,壁や障害物の位置情報を記した地図が必要となる.しかし環境中に搬送車が自ら運ぶ搬送カートによって,与えられた地図と一致せず,自己位置を推定できない場合がある.本研究では,特殊環境下におけるAGVの実現を目的とし,そのうちの電子地図生成の手法について述べる.電子地図生成にはICP-SLAMアルゴリズムを用い,搬送カートの有無による影響を軽減するため搬送カート認識アルゴリズムを加えた.
<キーワード>AGV,地図生成,SLAM,ICP |
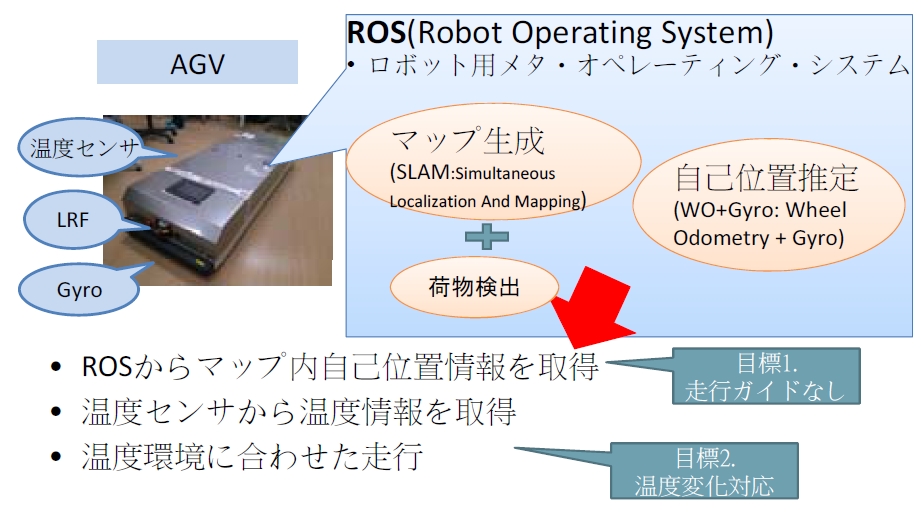 特殊環境下AGVシステム構成 |
IS2-B5
| 誤対応確率を最小化する3-D特徴点を用いた高速ロボットビジョン |
|
○永瀬誠信,秋月秀一,橋本学(中京大)
|
|
誤対応を起こしにくい高速な3次元物体認識手法を提案する.提案手法は, 物体モデル形状を分析することによって,周辺形状と類似しない,すなわち独自性の高い特徴点を自動決定する.ごく少数の特徴点のみを用いるため,高速なモデルマッチングが可能である.実際にばら積み部品を撮影した距離画像を用いた実験により,従来のSpin Image法に対して約9倍の処理速度,かつ認識成功率が72.0%から95.5%に向上したことを確認した.
<キーワード>3次元特徴点マッチング,ロボットビジョン,ポイントクラウドデータ処理 |
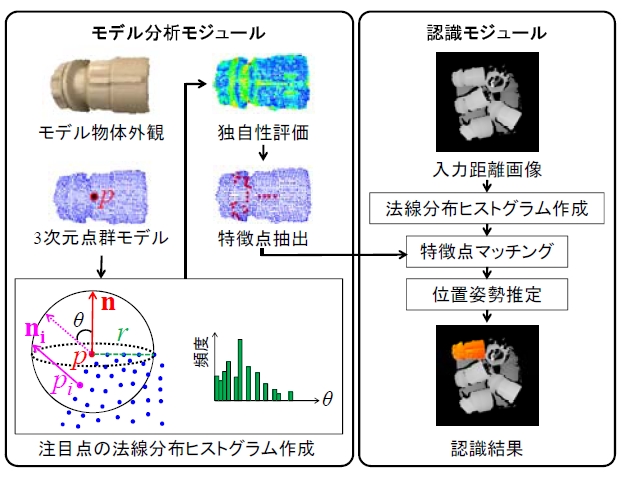 提案アルゴリズムの流れ |
IS2-B6
| 対応点照合により重み付けしたボクセルを用いた物体の位置・姿勢推定 |
|
○西川 諒,野口遼,中村明生(東京電機大)
|
|
本稿では,誤認識とオクルージョンに頑健な物体の位置・姿勢推定手法を提案する.提案手法では,形状とテクスチャ情報を持った3次元モデルを用いることによって,形状・テクスチャを個別に用いる手法より誤認識の少ない位置・姿勢推定を行う. まず3次元モデルの投影画像を生成し,環境とモデルの対応点を探索し,対応関係から物体の位置・姿勢を推定する.さらに位置・姿勢推定結果に対して環境とモデルの形状の一致度を求め,推定結果を評価する.推定結果の評価には,対応点照合の結果から3次元情報を重み付けしたボクセルを用いることでオクルージョンに対応する.評価値が低い結果は誤って位置・姿勢推定したとみなし誤認識を検出する.精度検証実験により,オクルージョンがある場合でも誤認識を検出し,推定精度を向上できることを確認した.
<キーワード>3次元物体認識,位置・姿勢推定,ボクセルマッチング |
 姿勢推定結果 |