- IS2-C 3次元計測
IS2-C1
| ロバスト単眼回転ステレオの開発とその3次元形状計測への融合的応用 |
|
○栢場皓之,金子俊一,金井理(北大),谷口敦史(日立製作所), 前田俊二(日立製作所,北大),宮本敦(北大) |
|
本論文では,自由曲面を持つ産業部品に対して高精度な3次元形状計測を行える基礎技術について提案する.ここで提案するステレオ計測は,ターンテーブル上の対象物を回転させながら全周囲画像を計測し,この画像群から3次元座標位置を推定する方法である.さらに,照明変動の影響が大きい金属光沢面を持つような産業部品に対してロバストな計測を行う工夫として,明度変化に対してロバスト性を有する方向符号照合法(Orientation Code Matching: OCM)を用いたステレオ計測を行う.提案手法の計測精度や照明変動に対する有効性を実計測された画像に基づく実験によって示す.
<キーワード>ステレオ計測,3次元形状計測,ロバスト性 |
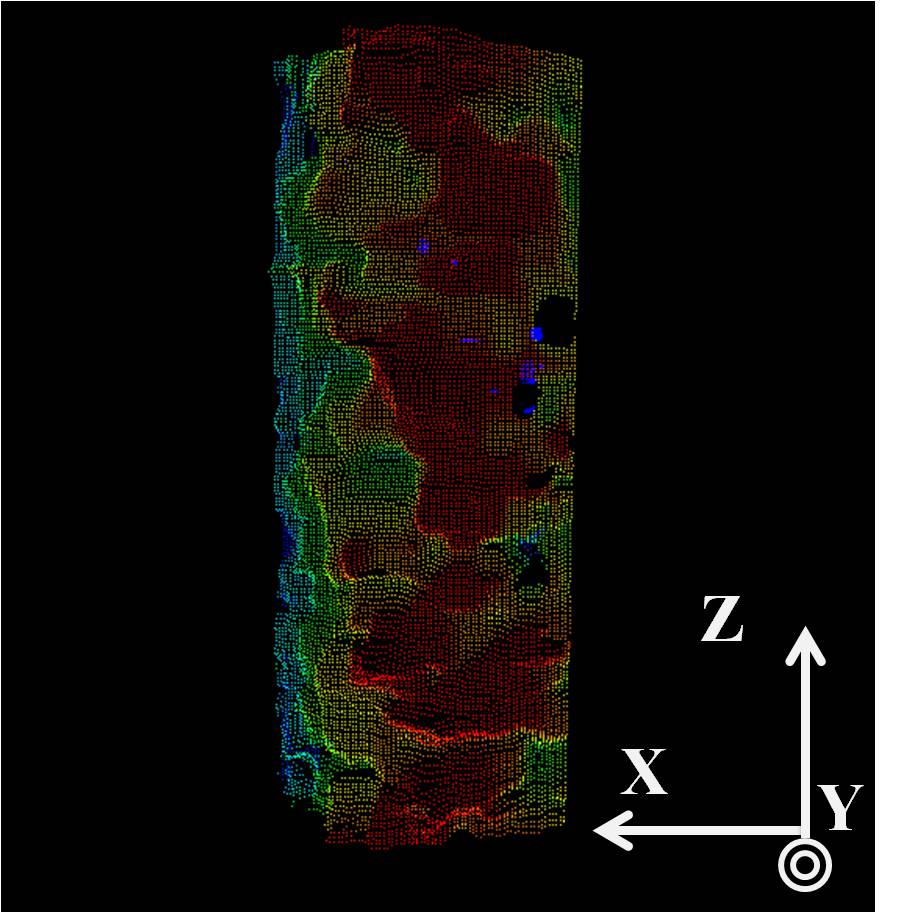 3次元計測結果 |
IS2-C2
| 平面検出精度向上のための全方位ステレオ視の改善 |
|
○鈴木亮,子安大士,前川仁(埼玉大),川崎洋(鹿児島大)
|
|
本稿では,全方位カメラによるステレオ視を用いて屋内環境の認識において重要である平面の情報を検
出するための,ステレオ視精度改善手法について述べる.全方位ステレオ視による広い視野の距離情報を高精度
化することで,周囲の環境を構成する平面を検出することが可能である.提案手法では,グラフカットにより高
精度化を図った手法に,適応的なSADの探索窓設定を加えることでさらなる高精度化を実現した.実環境におい
て実験を行い,提案手法によって平面検出の精度向上を確認した.
<キーワード>ステレオビジョン,平面検出,全方位カメラ |
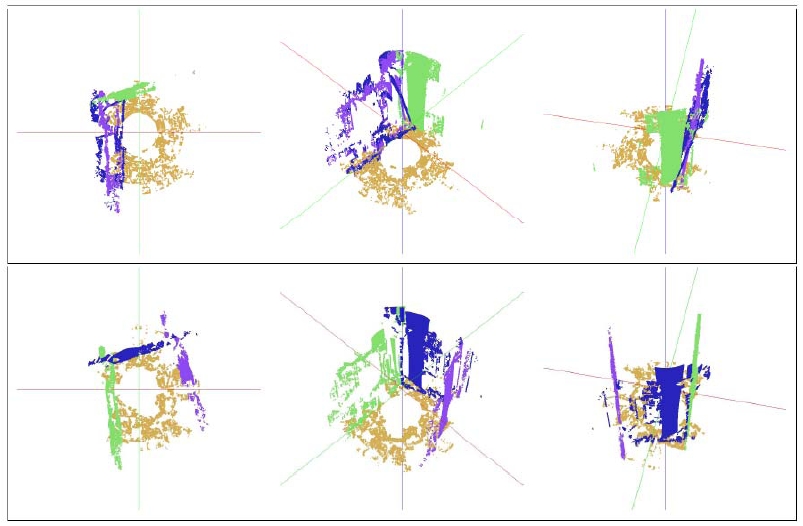 全方位ステレオ視によって観測した屋内環境の3次元距離情報点群から平面検出 (色は検出順番で着色)上段:従来手法,下段:提案手法. 従来手法においては位置の重視した2つの平面を検出していたが,ステレオ視精 度向上により提案手法による結果では重複が解消されるている.また従来手法で は検出できなかった平面を検出できるようになり,提案手法の効果が確認できる. |
IS2-C3
| 魚眼ステレオによる円筒状バリアセンシング |
|
○喜多伸之(産総研)
|
|
ある区域への物体の侵入を検知するためにバリアセンサが存在する.赤外線の投光機と受光装置からなるものや,レーザー距離センサからなるものなど市販されているが,いずれもバリアは平面である.一方,超広視野を持つ魚眼カメラ2台からなる魚眼ステレオによれば,カメラを中心とする半球の範囲で距離計測が行える.これをバリアセンシングに応用して,円筒状のバリアを構築する手法を提案する.
<キーワード>魚眼ステレオ,バリアセンサ,零視差 |
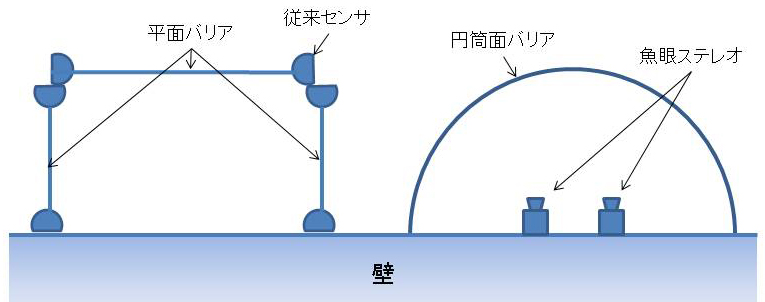 従来および提案するバリアセンシング |
IS2-C4
| モデリングによる原爆ドームのドーム形状の解析 |
|
○村上涼平,古川亮,青木広宙,青山正人,馬場雅志, 宮崎大輔,日浦慎作,浅田尚紀(広島市立大) |
|
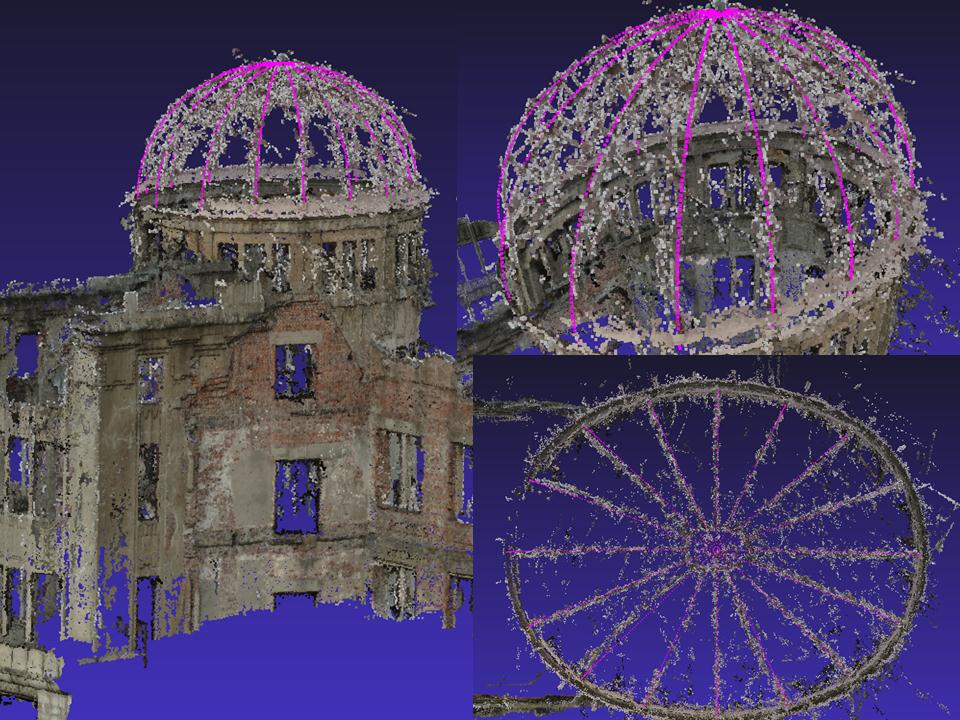
原爆ドームのドーム部分の歪みの推定をするために,ドーム形状の解析を行った.本研究では,多視点ステレオ法により原爆ドーム全体の復元を行い,ドーム部分の点データを幾何モデルに当てはめることで,精度の高い形状情報を得る.また,その際,鉄骨の間の角度について複数のモデルを考慮し,それらの比較を行った.原爆ドームは,楕円弧を等分割した位置に鉄骨を配置していることがわかった.今回得られた形状情報を真値(被爆前の形状)とし,今後は,被爆後の歪みを推定していく.
<キーワード>多視点ステレオ,モデル当てはめ,情報考古学 |
 |
IS2-C5
| 拡散符号化光投影法の投影パターンに関する検討 |
|
◯土屋寛,岩井大輔,佐藤宏介(阪大)
|
|
運動物体に対する高密度三次元画像計測の新たな設計法について考察する.本研究では,投影が重畳しても分離可能な時不変パターン光である,拡散符号化光を提案する.複数の光源から重畳投影された拡散符号化光を分離し,個々に三次元画像計測を行うことにより,運動物体に対しても高密度な計測が可能となる.分離に必要なパラメータ推定手法について示し,実験から提案手法の有効性を示す.
<キーワード>三次元計測,パターン光投影,拡散符号 |
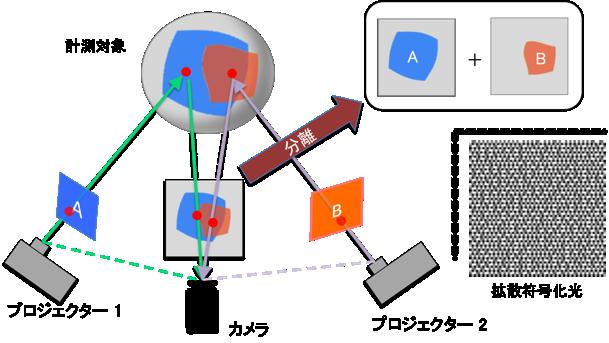 提案システム |
IS2-C6
| 水中3次元計測用スキャニングレーザセンサ |
|
○落水秀晃,今城勝治,亀山俊平,高林幹夫,平野嘉仁(三菱電機), 齋藤隆(三菱電機特機システム),石橋正二郎,吉田弘(海洋研究開発機構) |
|
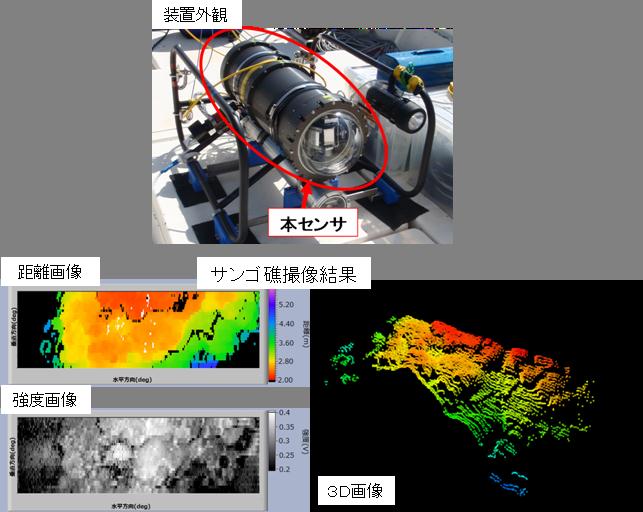
我々は,水中3次元計測のためのレーザセンサの開発を行っている.レーザ波長は,水中での減衰率の低い532nmを選択し,水深150mにて最大測距離20mを実現するためのレーザセンサを開発した.さらに,本センサを用いてプール及び実海域にて撮像実験を実施し,水中のターゲット断面の3次元計測に成功した.本報告では,開発背景及びセンサ構成,水中試験結果について述べる.
<キーワード>underwater,laser sensor,3D imaging |
 |
IS2-C7
| 全空間テーブル化手法で得られた多方向三次元形状の合成 |
|
○柾谷明大,森本吉春(4Dセンサー)
|
|
三次元形状計測法として,著者らは以前に全空間テーブル化手法を開発した.また,高速に位相シフトが可能な光源切替位相シフト法を開発した.これらの方法では,基準面を使っており,得られた座標は基準面に固定した座標系で表現される.一つの計測対象物体の全周を計測するために多方向からその物体の三次元形状を計測しても,同じ基準面を使うと同じ座標系で表現され,座標変換なしに合成できる.このようにして得られた物体形状計測の実利用例を示す.
<キーワード>全周形状計測,全空間テーブル化手法,格子投影法 |
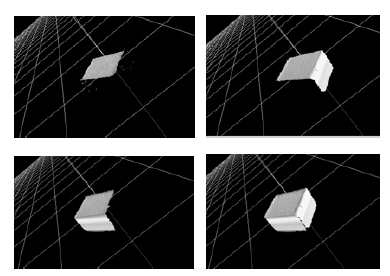 3方向からの形状計測の合成 左上:ユニット1の計測結果,右上:ユニット2の計測結果, 左下:ユニット3の計測結果,右下:3つのユニットの計測結果の合成 |
IS2-C8
| シーン中の周期構造を用いた多視点3次元復元のためのスケール推定 |
|
○佐々木貴之,池田聖, 岩井大輔, 佐藤宏介(阪大)
|
|
本研究では多視点画像からの3次元復元におけるスケールの推定手法を提案する.事前知識として様々な物体のスケールを与えておき,環境中の複数の物体と対応をとることで,画像中の物体と既知の物体を同定することなく,3次元復元されるシーン全体のスケールを求められることを示す.ここで,スケールを定める特徴として平面上の周期構造を用いることで,個々の物体のスケール算出の精度向上を図る.机上のシーンを対象とした実験で提案手法の有効性を確認した.
<キーワード>周期構造,自動スケール推定,多視点画像からの3次元復元 |
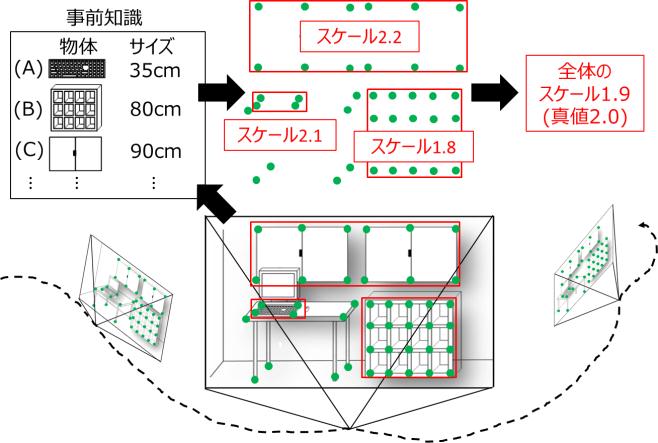 事前知識を用いた自動スケール推定 |
IS2-C9
| デジタルホログラフィによる三次元計測システムの開発 |
|
○ウキエツ,田口亮,梅崎太造(名工大), 保黒政大(中部大),堀米秀嘉(HolyMine) |
|
近年,三次元テレビなどの三次元形状出力デバイスの普及及び工業製品の精密検査の増加に伴い,三次元形状計測のニーズが高い.しかし,既存三次元計測手法の多くは計測誤差が大きく,透明と全反射物体に対する計測も困難である.本研究では,干渉原理及びフレネル回折理論を利用し,位相シフト式デジタルホログラフィの光学システムを構築することで,透明物体と全反射物体が計測できる高精度の三次元計測システムを提案する.
<キーワード>光学システム,デジタルホログラフィ,三次元計測 |
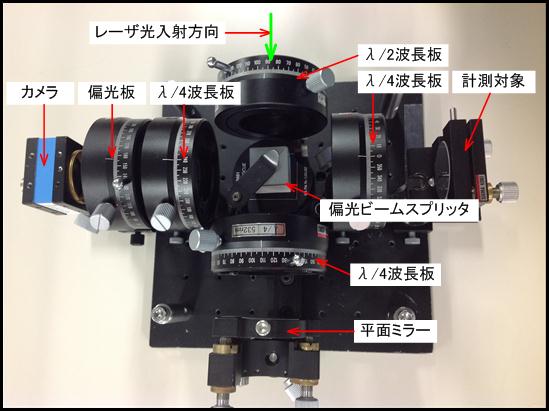 提案システムの外観 |
IS2-C10
| 3次元環境地図構築のためのEvolution Strategy Sample Consensus (ESSAC) |
|
◯戸田雄一郎,久保田直行(首都大)
|
|
近年,Virtual Reality (VR)技術やAugmented Reality (AR)技術の発展とともに,室内における3次元可視化システムへの期待が高まってきている.このような手法の多くは,対応点探索に7-point Random SAmple Consensus (RANSAC)を用いている.しかしながら,RANSACでは,誤対応点の多い画像では,安定して適切な対応点を探索することが困難である.そこで本稿では,RANSACにEvolution Strategy(ES)の探索を加えたESSACを提案し,その有効性を検証していく.
<キーワード>ロバスト推定法,進化計算,3次元環境地図構築 |
 |
IS2-C11
| 投影および撮影装置特性の補正による三次元計測精度の向上 |
|
○加藤嗣,田口亮(名工大),保黒政(中部大),梅崎太造(名工大)
|
|
市販のプロジェクタを用いることで安価な三次元計測装置を構築し,また高精度な計測の実現を目的とする.また,計測対象は電子基板上の実装部品などの微小な物体を想定している.我々はプロジェクタから投影した光をカメラで撮影して,使用する機器の特性,周辺環境による外乱を算出して,フィードバックする手法を提案する.視野39[mm]×30[mm],深度方向のキャリブレーションが3.0[mm]において,範囲本手法により計測精度が向上することを確認した.
<キーワード>3次元形状計測,位相シフト法,輝度補正 |
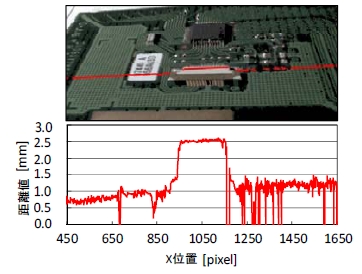 電子基板計測結果 |